





































Які є методи орієнтації роботів пилососів у просторі?
Одним з найважливіших параметрів будь-якого робота є система навігації. Від неї залежить наскільки коректно пристрій буде переміщатися по Вашій квартирі і будувати її карту прибирання. Чи зможе робот самостійно паркуватися на зарядку, продовжувати прибирання після дозарядки, і долати складності (у вигляді сходів, вузьких глухих кутів, проводів, скупчення стільців тощо). Важливо розуміти, що система орієнтації складається з великої кількості сенсорів, але визначальним є основний модуль навігації. Для розуміння ефективності навігації ми позначили її зірками за п'ятибальною шкалою і починаємо з найпростішого способу на базі гіроскопа.
Ви завжди можете вибрати найефективнішу модель у нашому каталозі

Навіщо взагалі потрібна навігація?
Робот без навігації після запуску просто хаотично їздить у різні боки до повної розрядки і потім зупиняється. Часто в таких моделях встановлені лише датчики торкання бампера або інфрачервоні датчики наближення до перешкоди, які дають зрозуміти, що робот щось уперся. Після чого він розвертається у випадковому напрямку та знову їде вперед. При цьому швидкість перед зіткненням часто не зменшується, тому є ризик трохи пошкодити меблі та стіни. І тим не менш, на невеликій обмеженій площі, скажімо в межах однієї кімнати, це має свій ефект, і в більшості випадків кімната все ж таки залишається прибраною. Роботів без навігації вже практично неможливо знайти на ринку, тому що їхня мала ефективність найчастіше не коштує вкладених грошей.
★☆☆☆☆
Гіроскопічна навігація
Такий робот часто здатний прибрати змійкою площу середніх розмірів (але не дуже складну), після чого самостійно повернеться на базу. Але працює це не завжди і не на будь-якій площі, і ось чому. Зазвичай у таких роботах встановлені: гіроскоп (визначає напрямок), датчик швидкості руху, датчики дотику бампера та датчики обриву. Напрямок та швидкість допомагають вираховувати траєкторію руху та пройдену дистанцію. Інші датчики виявляють межі прибирання (стіни, урвища, меблі тощо). Таким чином робот може непогано прибрати, а деякі навіть відобразити карту прибирання у смартфоні. Проте все це вираховується досить приблизно, так що з точністю у них проблеми, а досить складні ділянки взагалі можуть сильно заплутати робота. Розбіжність карти з реальністю стане занадто сильною, що неодмінно позначиться на прибиранні. Проте, якщо площа не дуже велика, а обстановка проста і зрозуміла, то такої навігації буде достатньо.
★★☆☆☆
Оптичний гіроскоп (SLAM, vSLAM)

Даний тип навігації дозволяє прибрати велику і площа зі складним плануванням, не залишаючи неприбраних ділянок, після чого самостійно повернеться на базу. А якщо заряду батареї не вистачить на всю площу, то один раз заїхати на базу, дозарядитись, і продовжити прибирання. Крім основного модуля (камери), такі роботи зазвичай мають великий спектр інших датчиків, так що їм не страшні обриви, скупчення стільців та інше. Крім того, працює і датчик виявлення килимових покриттів, так що робот самостійно підвищує потужність на килимах, і знижує її на твердій підлозі.
Недоліками такої системи є не найкраща точність, через що допустимі невеликі похибки карти і робот може періодично вдарятися об меблі. У темряві можуть відбуватися збої роботи і для роботи камери потрібно хоч якесь освітлення. З такою моделлю Вам буде доступна гарна карта прибирання, і можливість наносити на неї віртуальні обмежувачі. Це корисна функція, якщо є необхідність обмежити доступ до небажаних ділянок.
★★★☆☆
Лазерна навігація (LDS, LiDAR)

Дозволяє прибирати великі складні площі, не заїжджаючи по кілька разів в одне місце, і не залишаючи неприбраних ділянок, після чого самостійно повернеться на базу. Якщо заряду батареї не вистачить на всю площу, кілька разів заїжджати на базу, дозарядитися, і продовжувати прибирання. Таким чином площа збирання обмежується лише місцем у пилозбірнику. Крім основного модуля (Лідару), такі роботи забезпечені великим спектром інших датчиків, включаючи датчик виявлення килимів, нічим не поступаючись роботам з попередньої категорії. Але крім цього вони дуже точні, і складають чудову картку прибирання. А крім можливості наносити віртуальні обмежувачі, вам буде доступна покімнатна розбивка картки. Це відкриває великі можливості при складанні графіка прибирання (наприклад, з ранку пилососити коридор і кухню, вдень спальні, а ввечері вітальню) або просто відправляти робот прибрати конкретну кімнату. До того ж таким моделям притаманно запам'ятовувати кілька карт прибирання, що дозволяє комфортно використовувати його на різних поверхах, або навіть у різних приміщеннях, зберігаючи налаштування кожної з них.
★★★☆☆
Лазерна 3D навігація (PreciSense LiDAR)

Насправді той же LDS модуль, але скануючий вже не смужку по периметру, а більшу частину простору. Завдяки чому користувач має можливість переглядати об'ємну модель приміщення, замість пласкої карти.
★★★★☆
LDS + Виявлення об'єктів (DToF)

Перелічені вище способи навігації не здатні фіксувати все, що знаходиться нижче рівня корпусу робота, в той час як в реальності можуть зустрічатися подовжувачі, дроти, взуття і предмети інтер'єру. До появи цієї функції розуміння про попередню підготовку площі перед збиранням було само собою зрозумілим. Справа в тому, що роботи можуть намотувати на щітки дроти, засмоктувати шкарпетки та іграшки, після чого робот видає помилку, і чекає вашого втручання. Тому перед прибиранням необхідно максимально прибрати ці речі з підлоги. Але з появою модуля DToF забуті речі на підлозі більше не завадять збиранню. Як це працює?
До всіх переваг лазерної навігації додається додатковий модуль у вигляді 3D сканера і неактивної камери на передній частині бампера. Ця функція покликана уникати і мінімізувати контакт робота з великими предметами. Роботи з такими системами практично не стосуються меблів, намагаються акуратно обходити предмет на підлозі, але ця система не фіксує дрібні предмети і найнеприємніше - сюрпризи від домашніх вихованців. З цим може впоратися така система, яку ми написали нижче.
★★★★★
LDS + Камера з штучним інтелектом (AIVI, ReactiveAl, 3Dian)
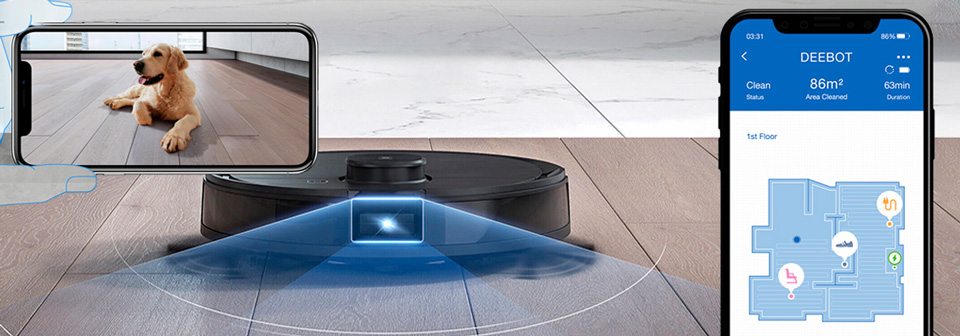
Дана система включає всі переваги лазерної навігації і модуль з активною камерою на передній частині бампера для виявлення і розпізнавання як великих, так і дрібних предметів на підлозі. Тобто цю систему назвали - навчальною системою штучного інтелекту. Так ось вже ця система здатна розпізнати сюрпризи від домашніх вихованців і з більшою мірою ймовірності уникнути контакту робота з ними. До того ж, до камери робота можна підключитися, дивитися відео через його камеру, робити скріншоти і керувати ним від першої особи. Тести цієї функції показують дуже хороші результати – відмінне виявлення та розпізнавання працює майже завжди, так що робот наносить на карту невідому перешкоду у вигляді іконки із зображенням предмета. З кожним оновленням програмного забезпечення ІІ показує найкращі результати розпізнавання.
Недоліком такої системи є те, що робот, обходячи подібні предмети, залишає неприбрані ділянки досить великого діаметру, що трохи позначається на якості прибирання, особливо якщо їх багато. І тим не менш, якщо ви хочете щоб вся площа була прибрана без прогалин, вам доведеться зібрати з підлоги предмети, які об'їжджатимуть робот, або відключити цю функцію.
Залишились питання? Наші менеджери завжди на зв'язку.
Гаряча лінія Robotics ![]() +38 (097) 707 47 44
+38 (097) 707 47 44




























")