


























")











Какие есть методы ориентации роботов пылесосов в пространстве?
Одним из важнейших параметров любого робота, является система навигации. От нее зависит на сколько корректно устройство будет перемещаться по Вашей квартире и строить ее карту уборки. Сможет ли робот самостоятельно парковаться на зарядку, продолжать уборку после дозарядки, и преодолевать сложности (в виде лестниц, узких тупиков, проводов, скопления стульев и т.п.). Важно понимать, что система ориентации состоит из большого количества сенсоров, но определяющим всегда является основной модуль навигации. Для понимания эффективности навигации, мы обозначили её звёздами по пятибальной шкале и начинаем с самого простого способа на базе гироскопа.
Вы всегда можете выбрать самую эффективную модель в нашем каталоге

Для чего вообще нужна навигация?
Робот без навигации после запуска просто хаотично ездит в разные стороны, до полной разрядки, и потом останавливается. За частую в таких моделях установлены лишь датчики касания бампера или инфракрасные датчики приближения к препятствию, которые дают понять, что робот во что-то упёрся. После чего он разворачивается в случайном направлении и снова едет вперед. При этом скорость перед столкновением зачастую не сбавляется и происходит удар, так что есть риск немного повредить мебель и стены. И тем не менее, на небольшой ограниченной площади, скажем в пределах одной комнаты, это имеет свой эффект, и в большинстве случаев комната все таки остается убранной. Роботов без навигации уже практически невозможно найти на рынке, потому как их малая эффективность зачастую не стоит вложенных денег.
★☆☆☆☆
Гироскопическая навигация
Такой робот за частую способен убрать змейкой площадь средних размеров (но не очень сложную), после чего самостоятельно вернется на базу. Но работает это не всегда, и не на любой площади, и вот почему. Обычно в таких роботах установлены: гироскоп (определяет направление), датчик скорости движения, датчики прикосновения бампера, и датчики обрыва. Направление и скорость помогают высчитывать траекторию движения и пройденную дистанцию. Остальные датчики обнаруживают границы уборки (стены, обрывы, мебель и т.п.). Таким образом робот может неплохо убрать, а некоторые даже отобразить карту уборки в смартфоне. И тем не менее всё это высчитывается довольно приблизительно, так что с точностью у них проблемы, а достаточно сложные участки вообще могут сильно запутать робота. Расхождение карты с реальностью станет слишком большим, что непременно скажется на качестве уборки. И тем не менее, если площадь не очень большая, а обстановка проста и понятна, то такой навигации будет достаточно.
★★☆☆☆
Оптический гироскоп (SLAM, vSLAM)

Данный тип навигации позволяет убрать большую и площадь со сложной планировкой, не оставляя неубранных участков, после чего самостоятельно вернется на базу. А если заряда батареи не хватит на всю площадь, то один раз заехать на базу, дозарядиться, и продолжить уборку. Кроме основного модуля (камеры), такие роботы обычно снабжены большим спектром других датчиков, так что им не страшны обрывы, скопления стульев и прочее. Кроме того работает и датчик обнаружения ковровых покрытий, так что робот самостоятельно повышает мощность на коврах, и снижает ее на твердом полу.
Недостатками такой системы является не лучшая точность, из-за чего допустимы небольшие погрешности карты и робот может периодически ударяться об мебель. В полной темноте могут происходить сбои работы и для работы камеры нужно хоть какое-то освещение. С такой моделью Вам точно будет доступна хорошая карта уборки, и возможность наносить на нее виртуальные ограничители. Это полезная функция, если есть необходимость ограничить доступ в нежелательные для уборки участки.
★★★☆☆
Лазерная навигация (LDS, LiDAR)

Позволяет убирать огромные сложные площади, не заезжая по несколько раз в одно место, и не оставляя неубранных участков, после чего самостоятельно вернется на базу. Если заряда батареи не хватит на всю площадь, то несколько раз заезжать на базу, дозарядиться, и продолжать уборку. Таким образом площадь уборки ограничивается лишь местом в пылесборнике. Кроме основного модуля (Лидара), такие роботы снабжены большим спектром других датчиков, включая датчик обнаружения ковров, ничем не уступая роботам из предидущей категории. Но кроме этого они предельно точны, и составляют отличную карту уборки. А кроме возможности наносить виртуальные ограничители, вам будет доступна покомнатная разбивка карты. Это открывает большие возможности при составлении графика уборки (к примеру с утра пылесосить коридор и кухню, днем спальни, а вечером гостиную) или просто отправлять робот убрать конкретную комнату. К тому же таким моделям присуще запоминать несколько карт уборки, что позволяет с комфортом использовать его на разных этажах, или даже в разных помещениях, сохраняя настройки каждой из них.
★★★☆☆
Лазерная 3D навигация (PreciSense LiDAR)

По сути тот же LDS модуль, но сканирующий уже не полоску по периметру, а большую часть пространства. Благодаря чему у пользователя есть возможность просматривать объемную модель помещения 3D, вместо плоской карты 2D.
★★★★☆
LDS + Обнаружение объектов (DToF)

Перечисленные выше способы навигации не способны фиксировать все, что находится ниже уровня корпуса робота, в то время как в реальности могут встречаться удлинители, провода, обувь и предметы интерьера. До появления этой функции понимание о предварительной подготовке площади перед уборкой было само собой разумеющимся. Дело в том, что роботы могут наматывать на щетки провода, засасывать носки и игрушки, после чего робот выдает ошибку, и ждет вашего вмешательства. Поэтому перед уборкой необходимо по максимуму убрать эти вещи с пола. Но с появлением модуля DToF забытые вещи на полу больше не помешают уборке. Как же это работает?
Ко всем преимуществам лазерной навигации тут добавляется дополнительный модуль в виде 3D сканера и неактивной камеры на передней части бампера. Данная функция призвана избегать и минимизировать контакт робота с крупными предметами. Роботы с такими системами практически не касаются мебели, стараются аккуратно обходить попавшийся предмет на полу, но эта система не фиксирует мелкие предметы и самое неприятное - сюрпризы от домашних питомцев. С этим может справиться следующая система, о которой мы написали ниже.
LDS + Камера с искусственным интеллектом (AIVI, ReactiveAl, 3Dian)
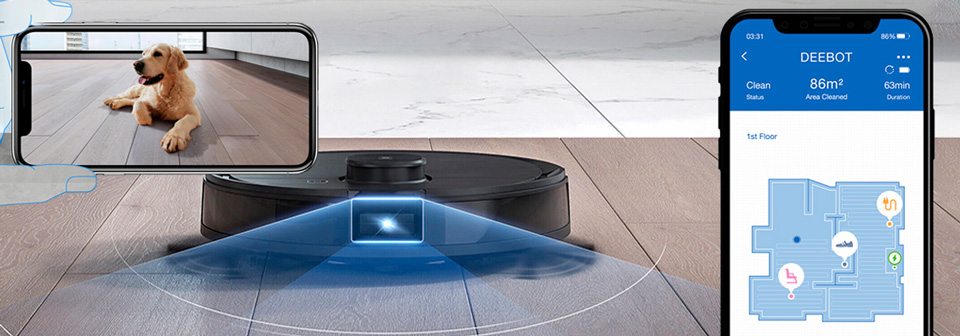
Данная система включает в себя все преимущества лазерной навигации и модуль с активной камерой на передней части бампера для обнаружения и распознавания как больших, так и мелких предметов на полу. Другими словами эту систему назвали - обучаемой системой искусственного интеллекта. Так вот уже эта система способна распознать сюрпризы от домашних питомцев и с большей степенью вероятности избежать контакта робота с ними. К тому же, к камере робота обычно можно подключиться, смотреть видео через его камеру, делать скриншоты и управлять им от первого лица. Тесты этой функции показывают очень хорошие результаты - отличное обнаружение и распознавание работает почти всегда, так что робот наносит на карту неизвестное препятствие в виде иконки с изображением предмета. С каждым обновлением программного обеспечения ИИ показывает лучшие результаты распознавания.
Недостатком такой системы является то, что робот обходя подобные предметы оставляет неубранные участки довольно большого диаметра, что немного сказывается на качестве уборки, особенно если их много. И тем не менее, если вы хотите чтобы вся площадь была убрана без пробелов, вам придется собрать с пола предметы, которые будет объезжать робот, или отключить эту функцию.
Остались вопросы? Наши менеджеры всегда на связи.
Горячая линия Robotics ![]() +38 (097) 707 47 44
+38 (097) 707 47 44



























")