


























")











Група вчених з Інституту Робототехніки Університету Карнегі-Меллон створила та випробувала у дії універсальну систему автономного картографування оточення. Вона може бути розміщена на різних роботизованих платформах і працює як у закритих просторах, так і на пересіченій місцевості, і навіть у повітрі.
Розроблена дослідниками система під назвою Autonomous Exploration Research Team на голову вища за будь-яку випробувану раніше технологію для створення об'ємних моделей оточення. Крім того, вона відносно мініатюрна, завдяки чому може бути поміщена навіть на квадрокоптері.

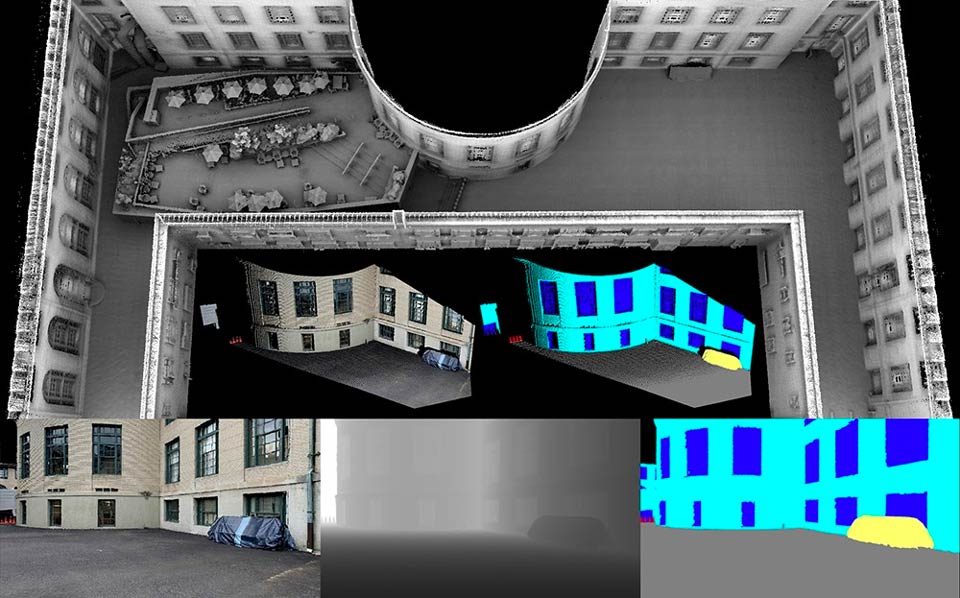
Винахідники домоглися не тільки підвищення якості одержуваних моделей, але і вдвічі швидшого сканування, порівняно з існуючими системами. Вона об'єднує в собі датчик 3D лідара, RGB камеру, датчики іннерціального вимірювального блоку і сам алгоритм дослідження, призначений для управління роботом.
Завдяки створеному ними алгоритму дослідження, який перебирає на себе всі функції огляду та управління, невелика апаратура може бути закріплена на будь-якому рухомому пристрої. Залежно від типу місцевості, яку необхідно досліджувати підбирається робот, який має необхідну рухливість, а програмним забезпеченням виступає сама система AERT.

Напевно, найяскравішим прикладом цієї функції стало модернізоване інвалідне крісло, з електроприводом, яке взагалі не призначене для автономної їзди, і має керуватися користувачем. Але його колісна база відмінно підходить для руху в приміщеннях, а це все, що потрібно. Розміщена на ньому система перетворила крісло на автономного робота для сканування приміщень.

Система була випробувана і в більш екстемальних умовах. AERT працює в трьох режимах, один з яких повністю автоматичний, в якому робот сам обирає оптимальний маршрут для найбільш повного та швидкого сканування. Завдяки цьому обладнана нею робо-собака виграла чемпіонат, на якому необхідно було якнайшвидше нанести на карту лабіринт із закинутих шахт.

Також система була випробувана на пересіченій місцевості, наносячи на карту лісові масиви поблизу університетського кампусу. У цьому випадку вона розміщувалася на роботі з гусеничним приводом, і теж показала себе добре. Інший режим дозволяє вказувати роботу точку, до якої необхідно дістатися, а він самостійно прокладає маршрут, оминаючи перешкоди.
І, звичайно ж, найбільш ефективним способом картографування відкритої місцевості є використання квадрокоптера. Третій режим управління полягає в ручному управлінні, але з величезним приємним бонусом. Система автоматично ухиляється від зіткнень і обходить перешкоди, страхуючи невмілого оператора від аварій.
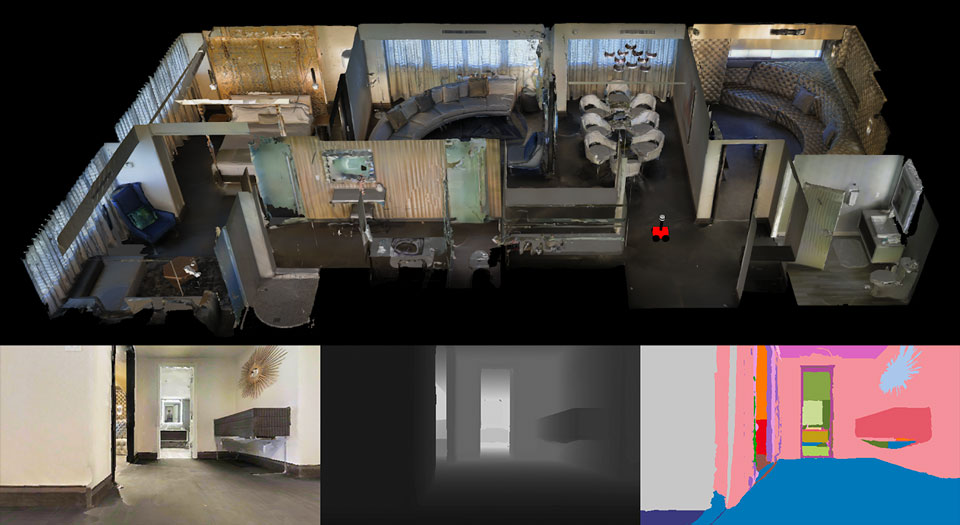
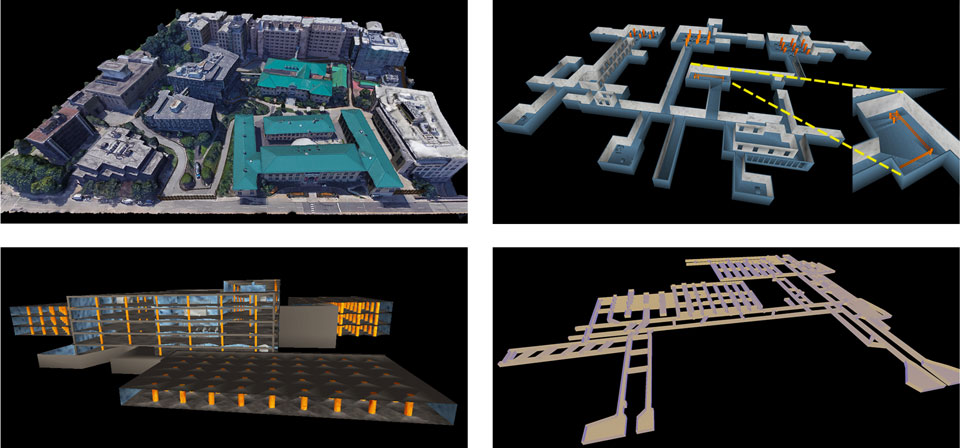
І нарешті, це все добре працює навіть на мініатюрних роботах, що нагадують звичайну машинку на радіо-управлінні. Використовуючи подібний недорогий девайс у комбінації з AERT, можна створити 3D модель будь-якого невеликого приміщення, типу житлової квартири.
Систему зараз навчають синхронної роботі, створення єдиної карти великих і складних ділянок території. У такому режимі вся команда ефективно діє в автоматичному режимі, і кожна машина повинна закривати свої зони відповідальності для створення повної 3D моделі.






")




























 Що Це?")



