


























")











Четвероногий робо-павук Magneco
Групою студентів Швейцарського Дослідницького Інституту ETH Zurich під патронажем професора Хаттера був створений прототип дуже перспективного робота для висотних робіт. Робот Magneco схожий на чотирилапого павука, і здатний переміщатися металевими конструкціями у всіх площинах, завдяки магнітним модулям на кінцівках.
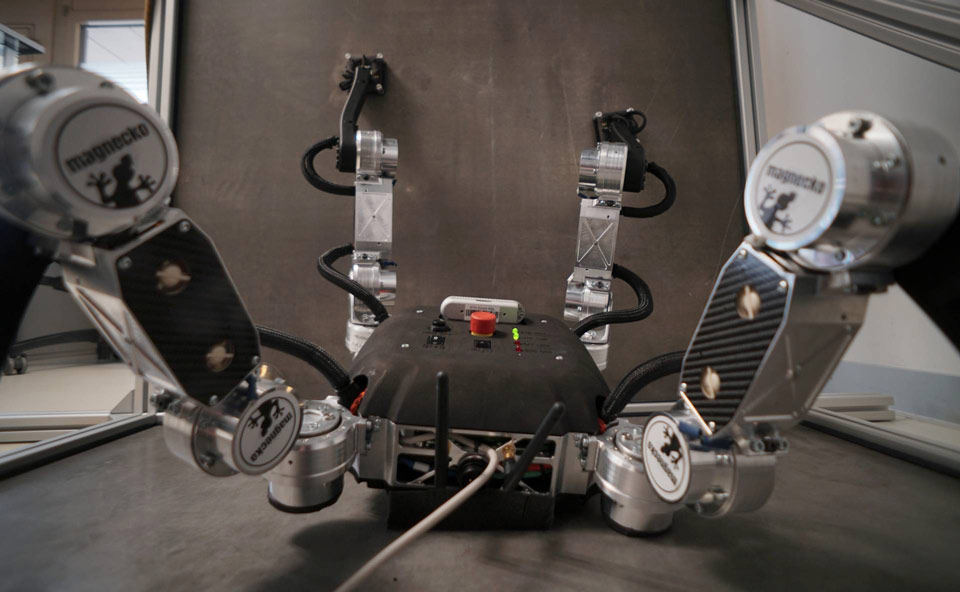
Кожна механічна кінцівка Магнеко має чотири ступені свободи, роблячи його дуже рухливим. Діапазон згинань дозволяє роботу перелазити з горизонтальної поверхні у вертикальну, залазити на стелю, і огинати балки по колу, як у горизонтальній, так і у вертикальній площині.
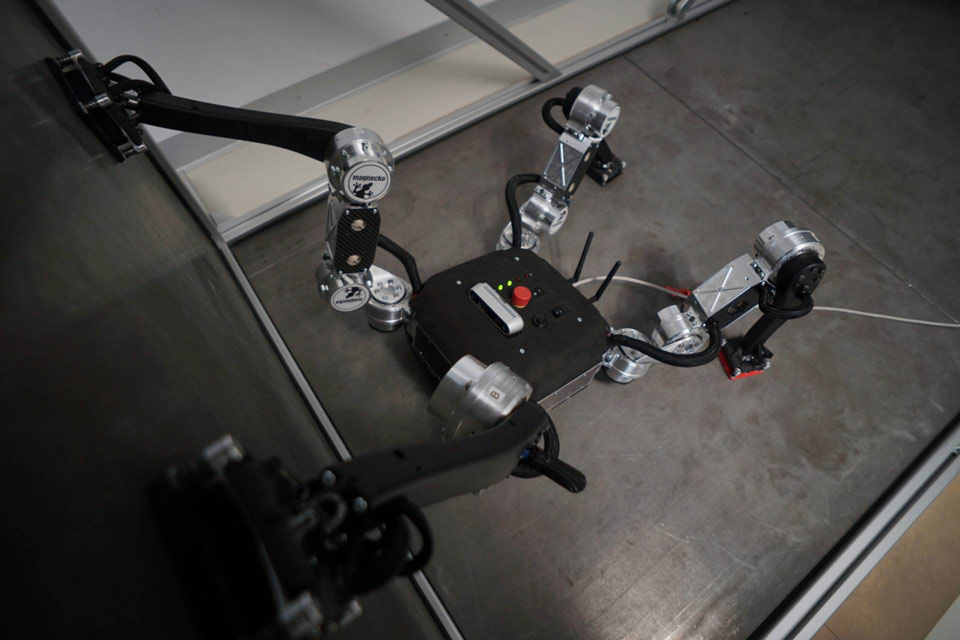
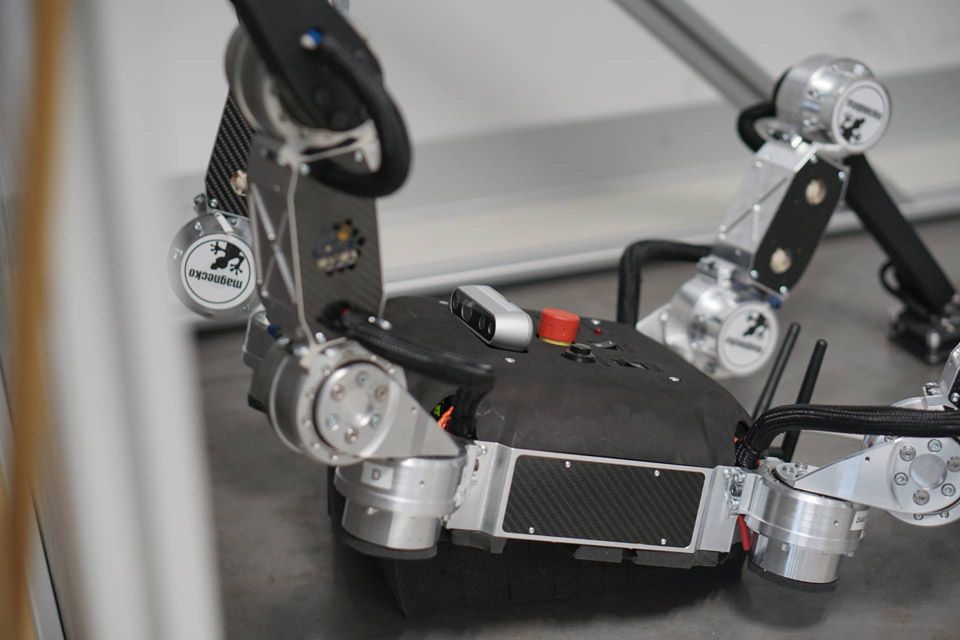
Одним із великих досягнень команди є розробка фіксуючих модулів. Вони використовуються постійні магніти, які вимагають струму лише у момент перемикання стану, а не протягом всього часу фіксації. Це значно знижує енергоспоживання пристрою, порівняно з іншими подібними розробками, що використовують магніти як присоску.

Кожна його лапа здатна витримати в два з половиною рази більше навантаження, ніж вага всього пристрою. Такий ступінь вантажопідйомності забезпечить стійкість та безпеку, навіть за умови розміщення на корпусі додаткового обладнання та наявності сильних поривів вітру.

Всі ці властивості роблять робот потенційно придатним для використання на висотних металоконструкціях та кораблях. Існує маса великих об'єктів, які необхідно періодично перевіряти на міцність та відсутність окислень. Не варто забувати і про небезпечні роботи на високовольтних лініях.
Те ж випробування на акустичну емісію вимагає безпосередньої близькості датчика до поверхні під час вимірювання. Але його вага і вимога нерухомості виключає виконання вимірювань квадрокоптером, і до точки все ще необхідно доставляти людину.

А якщо уявити, що такий апарат може бути забезпечений зварювальним модулем, обладнанням для монтажу або іншими додатковими пристроями, то його потенційна користь зростає в геометричній прогресії. Загалом сфера застосування такого робота велика, і він може бути дуже затребуваним у різних сферах.

На даний момент перед дослідниками стоїть наступне завдання: забезпечити робота необхідними сенсорами та програмним забезпеченням для самостійного прокладання маршрутів та подолання перешкод. Так як зараз прототипом необхідно керувати вручну.






")




























 Що Це?")



