
Группа ученых из Института Робототехники Университета Карнеги-Меллон создала и опробовала в действии универсальную систему автономного картографирования окружения. Она может быть размещена на разных роботизированых платформах, и работает как в закрытых пространствах, так и на пересеченной местности, и даже в воздухе.
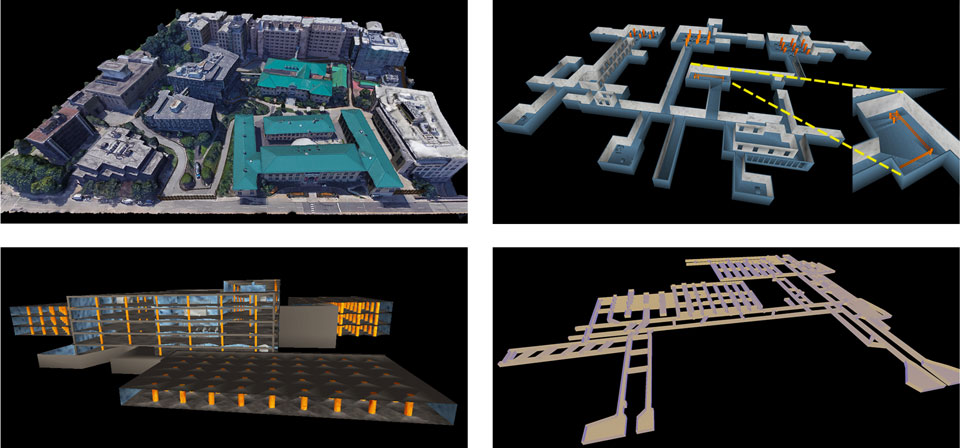
Разработанная исследователями система под названием Autonomous Exploration Research Team на голову выше любой созданной ранее технологии для создания объемных моделей окружения. Кроме того, она относительно миниатюрна, благодаря чему может быть помещена даже на квадрокоптер.

Изобретатели добились не только повышения качества получаемых моделей, но и в два раза более быстрого сканирования, в сравнении с существующими системами. Она бъединяет в себе датчик 3D лидара, RGB камеру, датчики иннерциального измерительного блока, и сам алгоритмом исследования, предназначенный для управления роботом.
Благодаря созданному ними алгоритму исследования, который берет на себя все функции обзора и управления, небольшая аппаратура может быть закреплена на любом устройстве: способном перемещаться. В зависимости от типа местности, которую необходимо исследовать подбирается робот, обладающими необходимой подвижностью, а программным обеспечением выступает сама система AERT.

Наверное самым ярким примером данной функции стало модернизированное инвалидное кресло, с электроприводом, которое вообще не предназначено для автономной езды, и должно управляться пользователем. Но его колесная база отлично подходит для движения в помещениях, а это все что нужно. Размещенная на нем система превратила кресло в автономного робота для сканирования помещений.

Система была испытанна и в намного более экстемальных условиях. AERT работает в трех режимах, один из которых полностью автоматический, в котором робот сам выбирает оптимальный маршрут, для наиболее полного и быстрого сканирования. Благодаря этому снабженная ней робо-собака выиграла чемпионат, на котором необходимо было как можно быстрее нанести на карту лабиринт из заброшенных шахт.

Также система была испытанна на пересеченной местности, нанося на карту лесные массивы недалеко от университетского кампуса. В данном случае она размещалась на роботе с гусеничным приводом, и тоже показала себя отлично. Другой режим позволяет указывать роботу точку, до которой необходимо добраться, а он самостоятельно прокладывает маршрут, обходя препятствия.
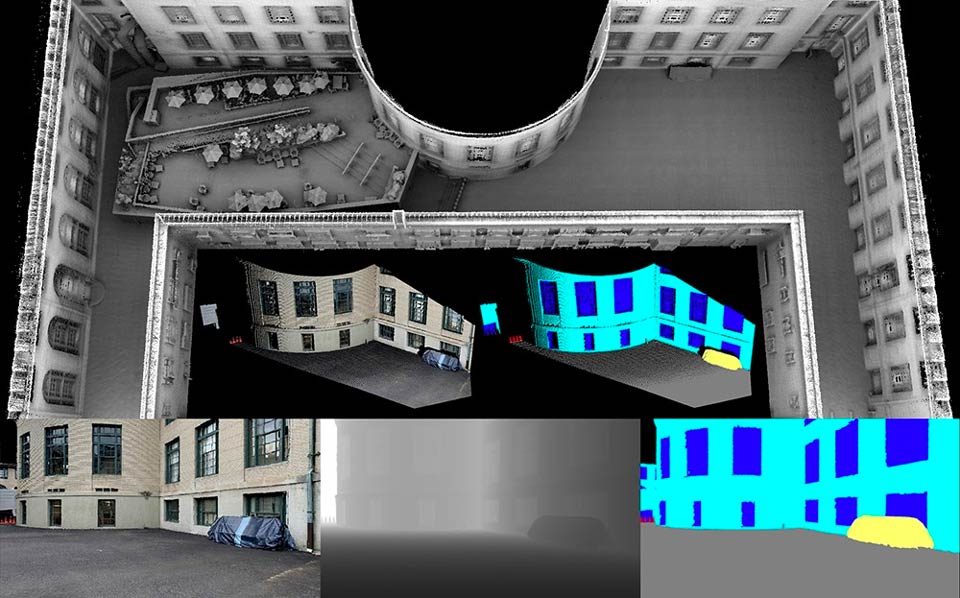
И конечно же наиболее эффективным способом картографирования открытой местности является использование квадрокоптера. Третий режим управления подразумевает собой ручное управление, но с огромным приятным бонусом. Система автоматически уворачивается от столкновений и обходит препятствия, страхуя неумелого оператора от аварий.
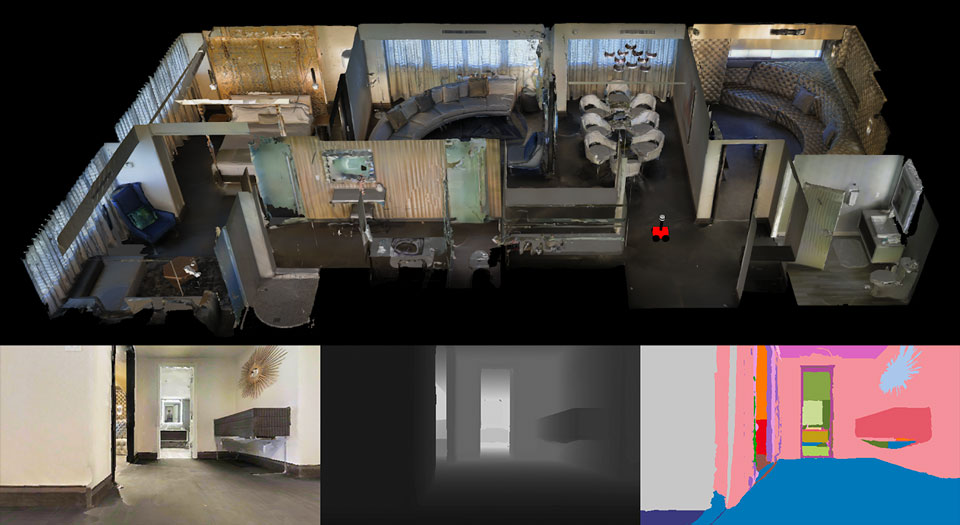
И наконец все отлично работает даже на миниатюрных роботах, напоминающих обычную машинку на радио-управлении. Используя подобный недорогой девайс в комбинации с AERT можно создать 3D модель любого небольшого помещения, типа жилой квартиры.
Систему на данный момент обучают синхронной работе, для создание единой карты больших и сложных участков местности. В таком режиме вся команда будет эффективно действовать в автоматическом режиме, и каждая машина должна закрывать свои зоны ответственности для создания полной 3D модели.
↩️ Последние новости и значимые события в мире робототехники

















")








")












