


























")











Четвероногий робо-паук Magneco
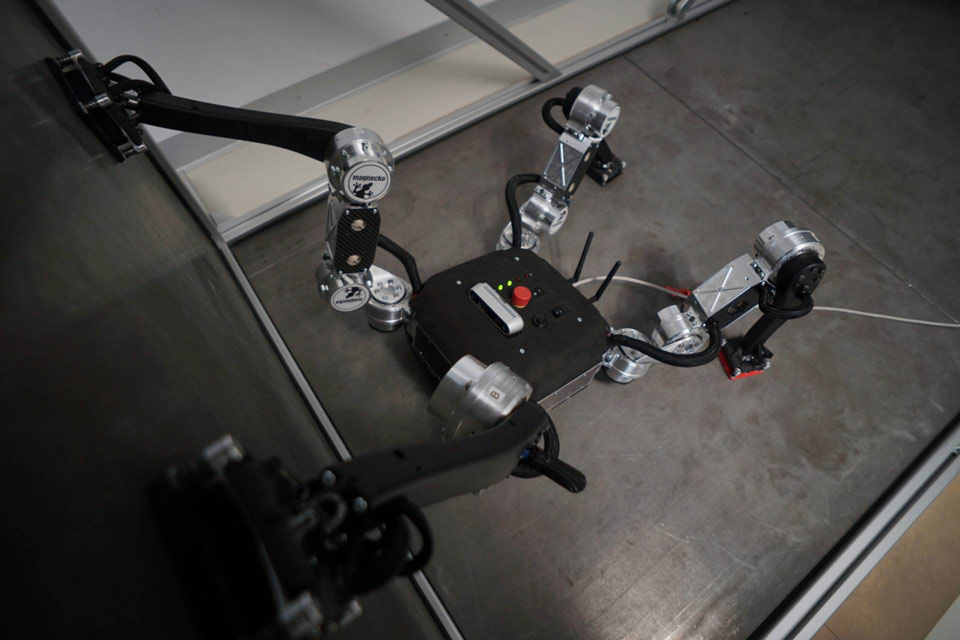
Группой студентов Швейцарского Исследовательского Института ETH Zurich, под патронажем профессора Хаттера, был создан прототип очень перспективного робота для высотных работ. Робот Magneco похож на четвероногого паука, и способен перемещаться по металлическим конструкциям во всех плоскостях, благодаря магнитным модулям на конечностях.
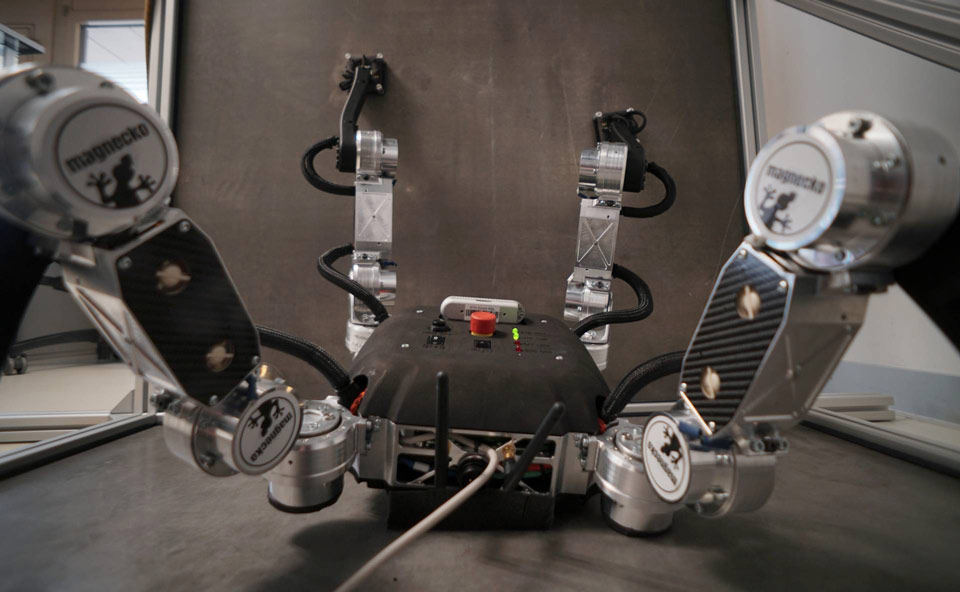
Каждая механическая конечность Магнеко имеет четыре степени свободы, делая его очень подвижным. Диапазон сгибаний позволяет роботу перелазить с горизонтальной поверхности в вертикальную, залазить на "потолок", и огибать балки по кругу, как в горизонтальной, так и в вертикальной плоскости.
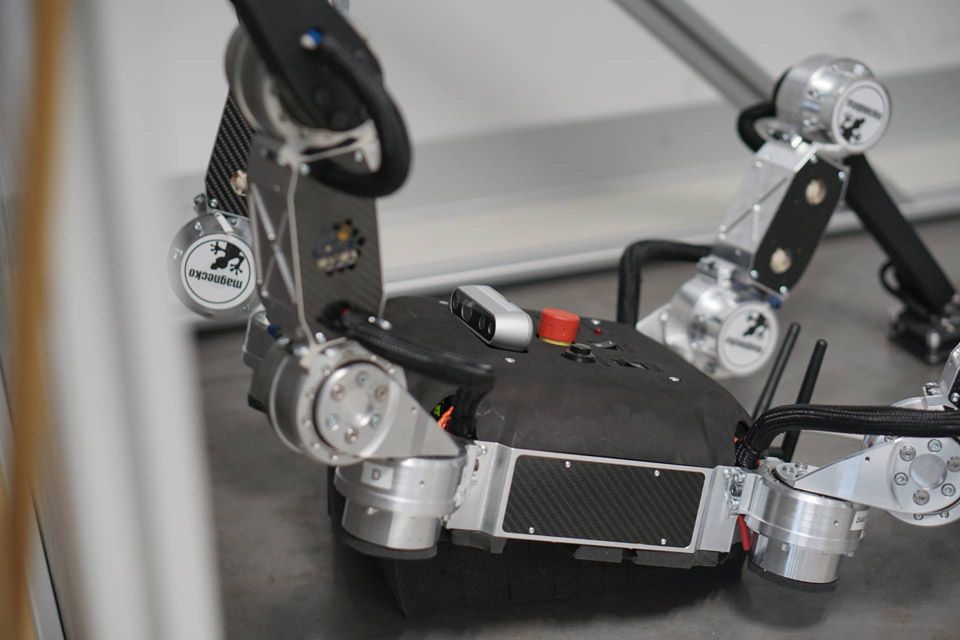
Одним из больших достижений команды является разработка фиксирующих модулей. В них используются постоянные магниты, которые требуют электричества только в момент переключения состояния, а не на протяжении всего времени фиксации. Это значительно снижает энергопотребление устройства, в сравнении с другими подобными разработками, использующими магниты в качестве присоски.

Каждая его лапа способна выдержать в два с половиной раза больше нагрузки, чем составляет вес всего устройства. Такая степень грузоподъемности обеспечит устойчивость и безопасность, даже при условии размещения на корпусе дополнительного оборудования, и наличии сильных порывов ветра.

Все эти свойства делают робот потенциально пригодным для использования на высотных металлоконструкциях и кораблях. Существует масса крупных объектов, которые необходимо периодически проверять на прочность, и отсутствие окислений. Не стоит забывать и об опасных работах на высоковольтных линиях.
То же испытание на акустическую эмиссию, требуют непосредственной близости датчика к поверхности во время измерения. Но его вес, и требование неподвижности исключает выполнение измерений квадрокоптером, и к точке все еще необходимо доставлять человека.

А если представить что такой аппарат может быть снабжен сварочным модулем, оборудованием для монтажа, или другими дополнительными устройствами, то его потенциальная польза возрастает в геометрической прогрессии. В общем область применения подобного робота велика, и оно может быть очень востребованным в разных сферах.

На данный момент перед исследователями стоит следующая задача: снабдить робота необходимыми сенсорами и программным обеспечением для самостоятельного прокладывания маршрутов, и преодоления препятствий. Так как на данный момент прототипом необходимо управлять вручную.
↩️ Последние новости и значимые события в мире робототехники






")




























 Что Это?")



