


























")











Перед вами простий баланс, що самобалансує, на двох колесах на ім'я WobblyBot. Можливо, це найпростіша конструкція робота, який може самостійно їздити на колесах та підтримувати баланс без акселерометра, гіроскопа та мікроконтролера. Робот по суті є маятником із опорою коліс на осі. Нижня частина тіла робота значно важча, ніж верхня. Це служить противагою, утримуючи тіло у вертикальному положенні та забезпечуючи йому баланс.
Зміст:
- Вступ
- Крок 1. Зібрати деталі разом
- Крок 2. Зробити колеса
- Крок 3. Тест-драйв
- Крок 4. Побудувати верхню частину тіла робота
- Крок 5. Налаштування робота
- Крок 6. Зробити зовнішню оболонку
- Підсумок
Вступ:
Перед вами простий баланс, що самобалансує, на двох колесах на ім'я WobblyBot. Можливо, це найпростіша конструкція робота, який може самостійно їздити на колесах та підтримувати баланс без акселерометра, гіроскопа та мікроконтролера.
Як він працює?
Робот по суті є маятником із опорою коліс на осі. Нижня частина тіла робота значно важча, ніж верхня. Це служить противагою, утримуючи тіло у вертикальному положенні та забезпечуючи йому баланс.

Крок 1. Зібрати деталі разом:
Опору для робота можна виготовити з листа MDF матеріалу, прикутого до алюмінієвих планок. Особливі складні матеріали не потрібні, для робота достатньо використовувати підручні деталі, яких зазвичай дуже багато. Опора також може бути виконана з багатьох інших матеріалів, як акрил.
Довжину опори ви робите за своїм бажанням, але ширина повинна відповідати утримувачу батареї типу D, при чому із запасом. Точне розміщення батарей дуже важливе, оскільки вони подвоюють противагу для робота.
Батареї повинні бути розміщені в крайній точці завдовжки і завширшки. Якщо робот не зможе підтримувати баланс у прямому положенні, або не зможе рухатися вперед і назад, одне колесо несе більше навантаження, ніж інше.
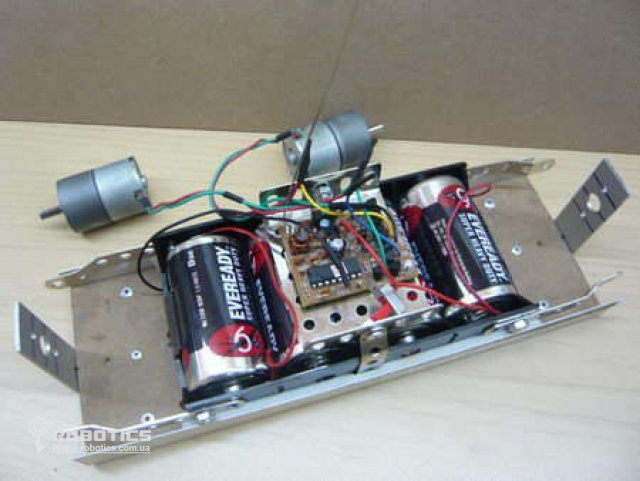
DC двигуни-редуктори можуть використовуватися 12V, 100мA, 130RPM і 58.8mN.m моментом, що крутиться. Двигуни працюють на половину потужності (близько 5,5 V та 50 мА), але це ми пояснимо пізніше.
Мотори-редуктори з постійним струмом використовують замість звичайних DC двигунів. Вони краще підходять для цього проекту у зв'язку з тим, що вони виробляють низькі обороти, і момент, що крутить, є достатнім для управління роботом. Зрештою робот стає дуже важким.
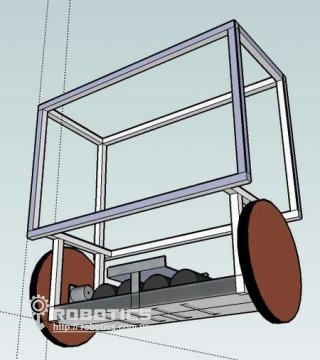
Двигуни встановлюються прямо на опору, залишаючи під собою пусте місце. У це місце необхідно буде додати деякі об'єкти для противаги.
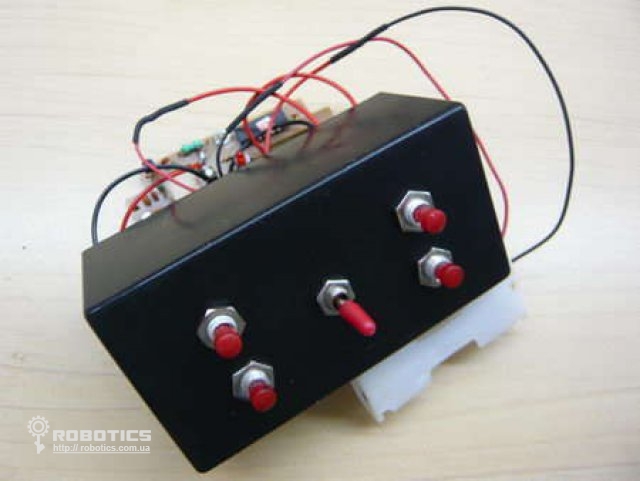
Схема керування двигунами встановлена зверху батарей.
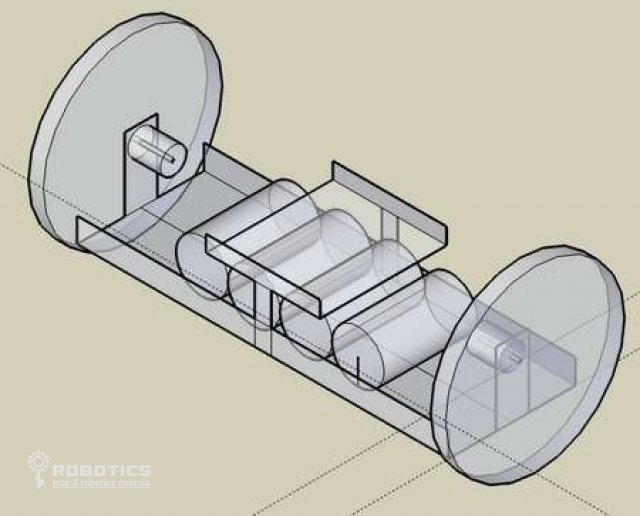
1 – місце для додаткових елементів, щоб вийшла противага; 2 - схема для руху; 3 - місце для додаткових елементів, щоб вийшла противага
Крок 2. Зробити колеса:
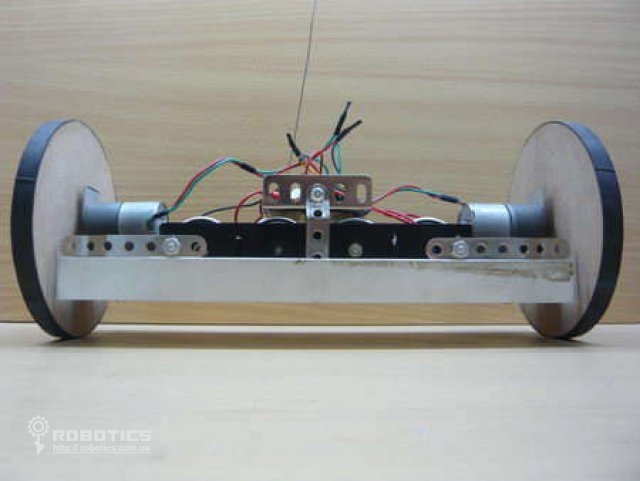
Колеса діаметром 11 см повинні відповідати ширині основи. Якщо ви вдома не можете знайти вже готові підходящі коліщатка, вам доведеться виготовити їх самостійно.
Колеса можна вирізати з MDF листа завтовшки 1 см за допомогою кільцевої пилки. Для зчеплення можна вирізати кільця із внутрішньої частини шини від мотоцикла та обмотати ними кола коліс.

Крок 3. Тест-драйв:
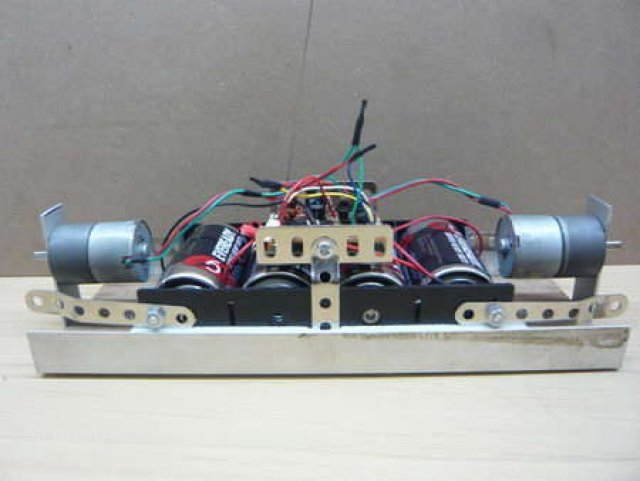
Колеса прикріплені чітко до валу із двигуном. Тому можна спробувати як балансуватиме конструкція на даному етапі роботи. Для цього можна зробити деякого роду тест-драйв.
Залежно від того, який використовується двигун DC і який розподіл ваги, є три можливі результати тесту:
- Робот не може зрушити з місця, оскільки його двигуни не виробляють достатню кількість моментів, що крутяться для руху.
- Мотор двигуна, що крутиться, наскільки швидкий, що основа починає повністю прокручуватися практично відразу після того, як робот відривається від вихідної позиції.
- Робот рухається, але похитування його основи невеликі і починаються або зі стартової позиції, або коли він змінює напрямок.
Якщо робот стоїть на місці, значить потрібно замінити батареї типу С на АА, але швидше за все тут допоможе заміна двигуна з великим моментом, що крутиться.
Якщо конструкція здійснює повні оберти, потрібно або зменшити кількість моментів, що крутяться, за допомогою обмежувальних сенсорів, або додати додаткову вагу на опору.
Незначні коливання основи, коли робот починає рухатись чи змінювати напрямок – це абсолютно нормально. Сила, отримана від моментів двигуна, що крутяться, на відміну від маси опори і як сили, виробляє баланс після декількох обертів коліс.
1 - ліве колесо: вперед і назад; 2 – вимикач; 3 – праве колесо: вперед та назад
Крок 4. Побудувати верхню частину тіла робота:
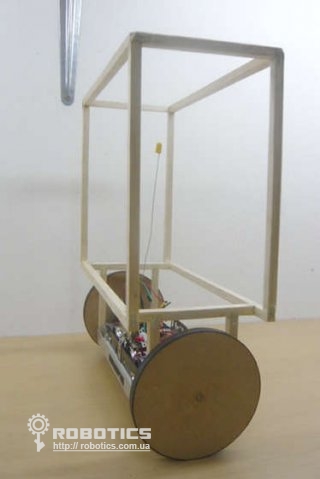
Верхня частина тіла робота є рамкою, яку можна зробити з бальзового дерева і додати трохи креативу. Ціль – тримати верхню частину тіла настільки легкою, наскільки можна, звичайно, через дерево. Стики потрібно акуратно з'єднати клеєм та скріпками, щоб надійно закріпити конструкцію.
Рамка тримається на місці на основі з підвісами на чотирьох кінцях і верхні чотири кінці рамки трохи звужені для того, щоб було простіше зробити зовнішній каркас для робота.
1 – опорні стійки; 2 – опорні стійки; 3 і 4 - звужені кінці

Крок 5. Налаштування робота:
Робот може бути здатний стояти рівно стаціонарному положенні. Якщо він стоїть криво, просто потрібно додати ваги до протилежної сторони. Ключовим моментом є баланс. Якщо робот не може триматися рівно, він не зможе балансувати, або рухатися вперед і назад (бо одне колесо несе більше навантаження, ніж інше.)
Ви також можете настроїти кількість коливань. Чим більше противаги додано на опору, тим менше отримує робот коливань. Потрібно враховувати той факт, що вага має бути розподілена рівномірно.
Також зверніть увагу, що більше ваги буде додано на верхню рамку робота, коли ви встановите верхній каркас, противагу буде компенсовано відповідно.
Налаштувати правильний баланс у вас може зайняти кілька спроб. Необхідно знайти правильну кількість противаги для правильного балансу. Але не перестарайтеся, інакше зіпсуєте двигун.
Найпростіший спосіб додати вагу та збалансувати робота – це використання додаткових елементів із свинцю. Просто прикріпіть їх на опору.

Крок 6. Зробити зовнішню оболонку:
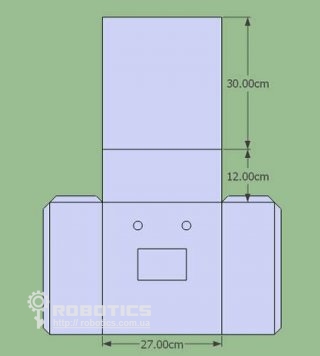
У цій частині роботи ви можете виявити свою креативність. Зовнішня оболонка може бути виготовлена зі звичайного картону.
Подумайте про це, адже насправді не має значення, що буде замість особи у вашого робота, це ваше право.
Картонний фасад зроблений таким чином, що він може плавно одягатися та зніматися з каркасної рамки робота. Він має бути встановлений без клею чи монтажу. Так простіше буде щось підправити у внутрішній частині робота, наприклад, вимкнути робота, щоб замінити батарейки.


Підсумок:
Такий виходить цікавий і нескладний робот WobblyBot. Звичайно, він служить винятково з розважальною метою, але на його основі можна буде навчитися виконувати більш складні конструкції. Спробуйте зробити цей милий пристрій, вам сподобається!

")

")
")
")
")
")
")
")
")
")
")
")

")