


























")











Перед вами простой самобалансирующий робот на двух колесах по имени WobblyBot. Возможно, это самая простая конструкция робота, который может самостоятельно ездить на колесах и поддерживать баланс без акселерометра, гироскопа и микроконтроллера. Робот по существу является маятником с опорой колес на оси. Нижняя часть тела робота значительно тяжелее, чем верхняя. Это служит противовесом, удерживая тело в вертикальном положении и обеспечивая ему баланс...
Содержание:
- Введение
- Шаг 1. Собрать детали вместе
- Шаг 2. Сделать колеса
- Шаг 3. Тест-драйв
- Шаг 4. Построить верхнюю часть тела робота
- Шаг 5. Настройка робота
- Шаг 6. Сделать внешнюю оболочку
- Итог
Введение:
Перед вами простой самобалансирующий робот на двух колесах по имени WobblyBot. Возможно, это самая простая конструкция робота, который может самостоятельно ездить на колесах и поддерживать баланс без акселерометра, гироскопа и микроконтроллера.
Как же он работает?
Робот по существу является маятником с опорой колес на оси. Нижняя часть тела робота значительно тяжелее, чем верхняя. Это служит противовесом, удерживая тело в вертикальном положении и обеспечивая ему баланс.

Шаг 1. Собрать детали вместе:
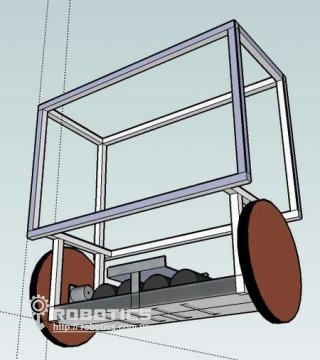
Опору для робота можно изготовить из листа MDF материала, прикованного к алюминиевым планкам. Особые сложные материалы не потребуются, для робота достаточно использовать подручные детали, которых обычно очень много. Опора также может быть выполнена из множества других материалов, как акрил.
Длину опоры вы делаете по своему желанию, но ширина должна соответствовать держателю батареи типа D при чем с запасом. Точное размещение батарей очень важно, поскольку они удваивают противовес для робота.
Батареи должны быть размещены в крайней точке в длину и в ширину. Если робот не сможет поддерживать баланс в прямом положение, или не сможет двигаться вперед и назад, значит одно колесо несет больше нагрузку, чем другое.
DC двигатели-редукторы могут использоваться 12V, 100мA, 130RPM и 58.8mN.m крутящимся моментом. Двигатели работают на половину мощности (около 5,5 V и 50 мА), но это мы объясним позже.
Моторы-редукторы с постоянным током используются вместо обычных DC двигателей. Они лучше подходят для этого проекта в связи с тем, что они производят низкие обороты, и крутящий момент является достаточным для управления роботом. В конечном итоге робот становится очень тяжелым.
Двигатели устанавливаются прямо на опору, оставляя под собой пустое место. В это место по необходимости нужно будет добавить некоторые объекты для противовеса.
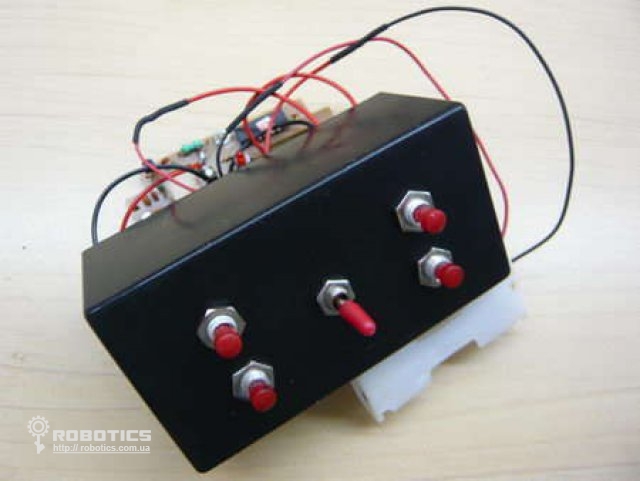
Схема управления двигателями установлена сверху батарей.
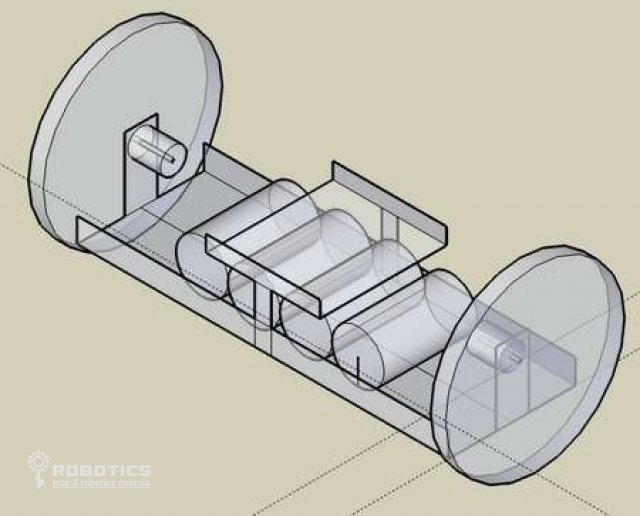
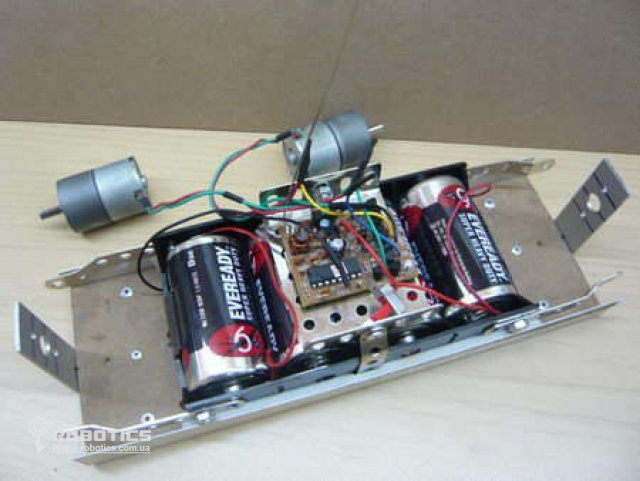
1 – место для дополнительных элементов, чтобы получился противовес; 2 – схема для движения; 3 - место для дополнительных элементов, чтобы получился противовес
Шаг 2. Сделать колеса:
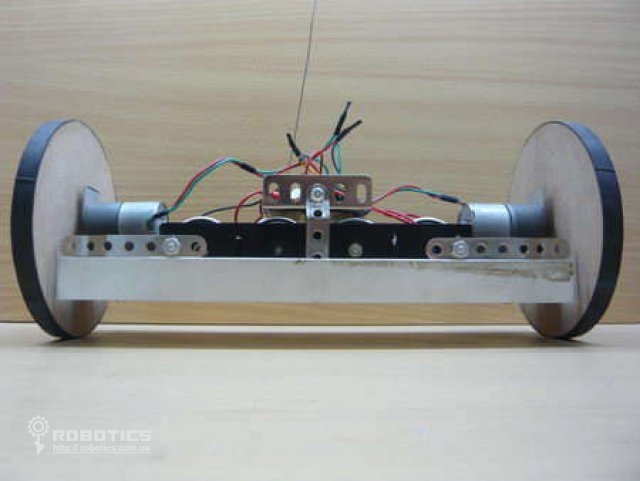
Колеса диаметром 11 см должны соответствовать ширине основы. Если вы у себя дома не можете найти уже готовые подходящие колесики, вам придется изготовить их самостоятельно.
Колеса можно вырезать из MDF листа толщиной 1 см с помощью кольцевой пилы. Для сцепления можно вырезать кольца из внутренней части шины от мотоцикла и обмотать ими окружности колес.

Шаг 3. Тест-драйв:
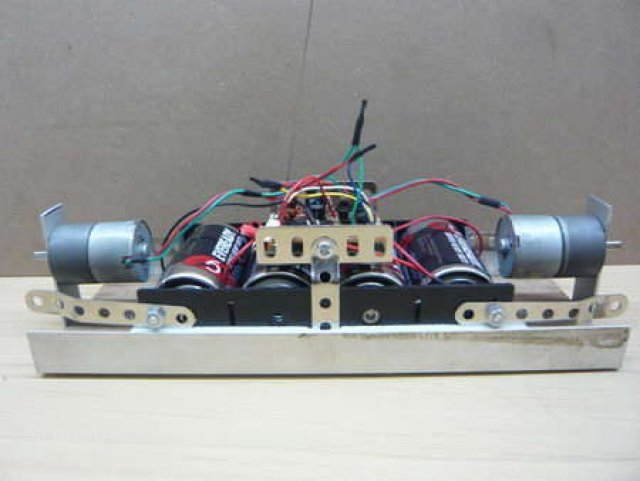
Колеса прикреплены четко к валу с двигателем. Поэтому можно попробовать как будет балансировать конструкция на данном этапе работы. Для этого можно устроить некоторого рода тест-драйв.
В зависимости от того, какой используется DC двигатель и какое распределение веса, есть три возможных результата теста:
- Робот не может сдвинуться с места, поскольку его двигатели не производят достаточное количество крутящихся моментов для движения.
- Крутящийся момент двигателя насколько быстрый, что основа начинает полностью прокручиваться практически сразу после того, как робот отрывается от исходной позиции.
- Робот двигается, но покачивания его основы небольшие и начинаются или со стартовой позиции, или когда он меняет направление.
Если робот стоит на месте, значит нужно заменить батареи типа С на АА, но скорее всего здесь поможет замена двигателя с большим крутящимся моментом.
Если конструкция совершает полные обороты, нужно либо уменьшить количество крутящихся моментов с помощью ограничивающих сенсоров, или добавить дополнительный вес на опору.
Незначительные колебания основы, когда робот начинает двигаться или изменять направление – это совершенно нормально. Сила, полученная от крутящихся моментов двигателя в отличие от массы опоры и как силы, производит баланс после нескольких оборотов колес.
1 – левое колесо: вперед и назад; 2 – выключатель; 3 – правое колесо: вперед и назад
Шаг 4. Построить верхнюю часть тела робота:
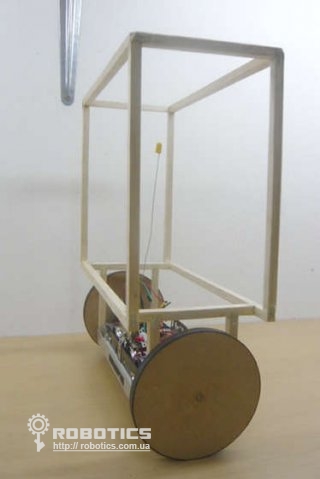
Верхняя часть тела робота представляет собой рамку, которую можно сделать из бальзового дерева и добавить немного креатива. Цель – держать верхнюю часть тела настолько легкой, насколько можно, конечно, из-за дерева. Стыки нужно аккуратно соединить клеем и скрепками, чтобы надежно закрепить конструкцию.
Рамка держится на месте на основе с подвесами на четырех концах и верхние четыре конца рамки немного зауженные для того, что бы было проще сделать внешний каркас для робота.
1 – опорные стойки; 2 – опорные стойки; 3 и 4 – зауженные концы

Шаг 5. Настройка робота:
Робот должен быть способен стоять ровно в стационарном положении. Если он стоит криво, просто нужно добавить веса к противоположной стороне. Ключевым моментом здесь является баланс. Если робот не может держаться ровно, он не сможет балансировать, или двигаться вперед и назад (потому что одно колесо несет больше нагрузки, чем другое.)
Вы также можете настроить количество колебаний. Чем больше противовеса добавлено на опору, тем меньше получает робот колебаний. Нужно учитывать тот факт, что вес должен быть распределен равномерно.
Также обратите внимание на то, что больше веса будет добавлено на верхнюю рамку робота, когда вы установите верхний каркас, противовес будет компенсирован соответственно.
Настроить правильный баланс у вас может занять несколько попыток. Необходимо найти правильное количество противовеса для правильного баланса. Но не переусердствуйте, иначе испортите двигатель.
Самый простой способ добавить вес и сбалансировать робота – это использование дополнительных элементов из свинца. Просто прикрепите их на опору.

Шаг 6. Сделать внешнюю оболочку:
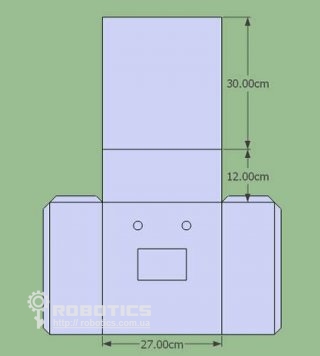
В этой части работы вы можете проявить свою креативность. Внешняя оболочка может быть сделана из обычного картона.
Подумайте об этом, ведь на самом деле неважно, что будет вместо лица у вашего робота, это ваше право.
Картонный фасад сделан таким образом, что он может плавно одеваться и сниматься с каркасной рамки робота. Он должен быть установлен без клея или монтажа. Так проще будет что-то подправить во внутренней части робота, например, выключить робота, чтобы заменить ему батарейки.


Итог:
Такой получается интересный и не сложный робот WobblyBot. Конечно, он служит исключительно в развлекательных целях, но на его основе можно будет научиться выполнять более сложные конструкции. Попробуйте сделать сами это милое устройство, вам понравится!

")

")
")
")
")
")
")
")
")
")
")
")

")