


























")











Створюємо підводний дрон своїми руками
Зміст:
- Введення
- Крок 1: Дизайн
- Крок 2: Рама
- Крок 3: Рушії
- Крок 4: Навігація
- Крок 5: Камери
- Крок 6: Підсвічування
- Крок 7: Блок управління
- Крок 8: Живлення
- Крок 9: Контроль
- Крок 10: Кабель
- Висновок
У багатьох людей є улюблене зайняття, хобі, яке приносить їм багато позитивних емоції. Не виключення і ті люди, які люблять машинки на радіоуправлінні, пілотовані вертольоти, квадрокоптеры і, звичайно ж, підводні човни. Найцікавіше зайняття - це будівництво такого апарату своїми руками : можна самостійно визначитися з устаткуванням і оснащенням пристрою, придумати його зовнішній вигляд і функціональні можливості, розробити управління і контроль над човном, і багато що інше.
Ця інструкція допоможе Вам зробити або почерпнути багато корисної інформації про будівництво безпілотного підводного апарату у себе удома.
Крок 1: Дизайн
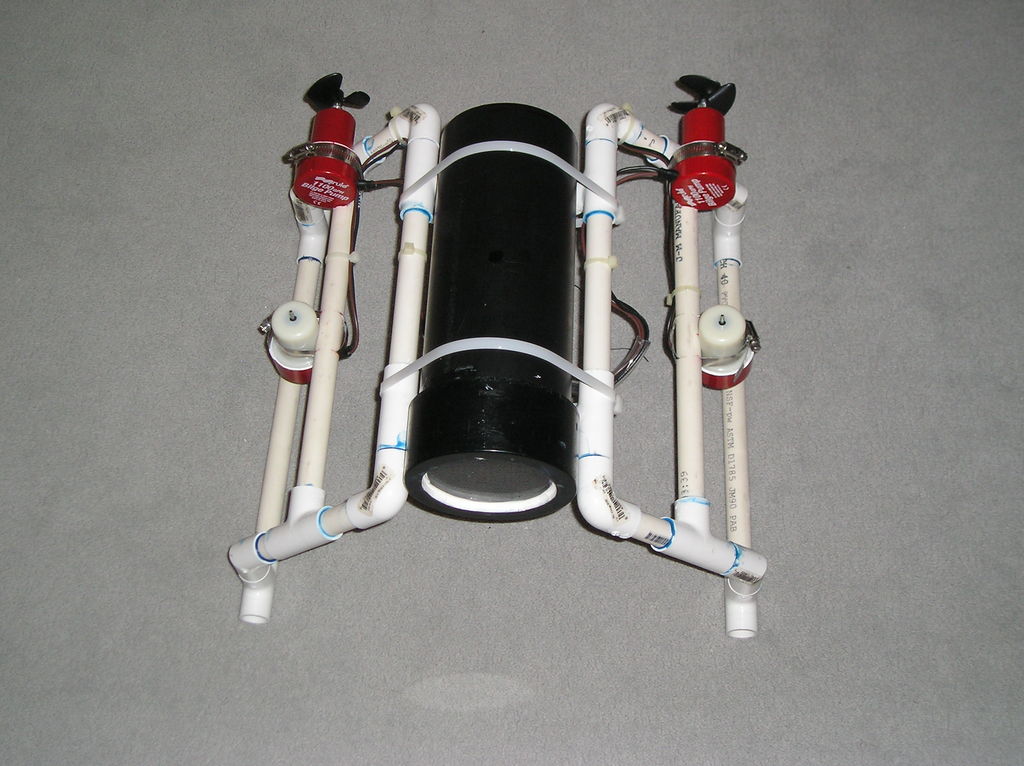
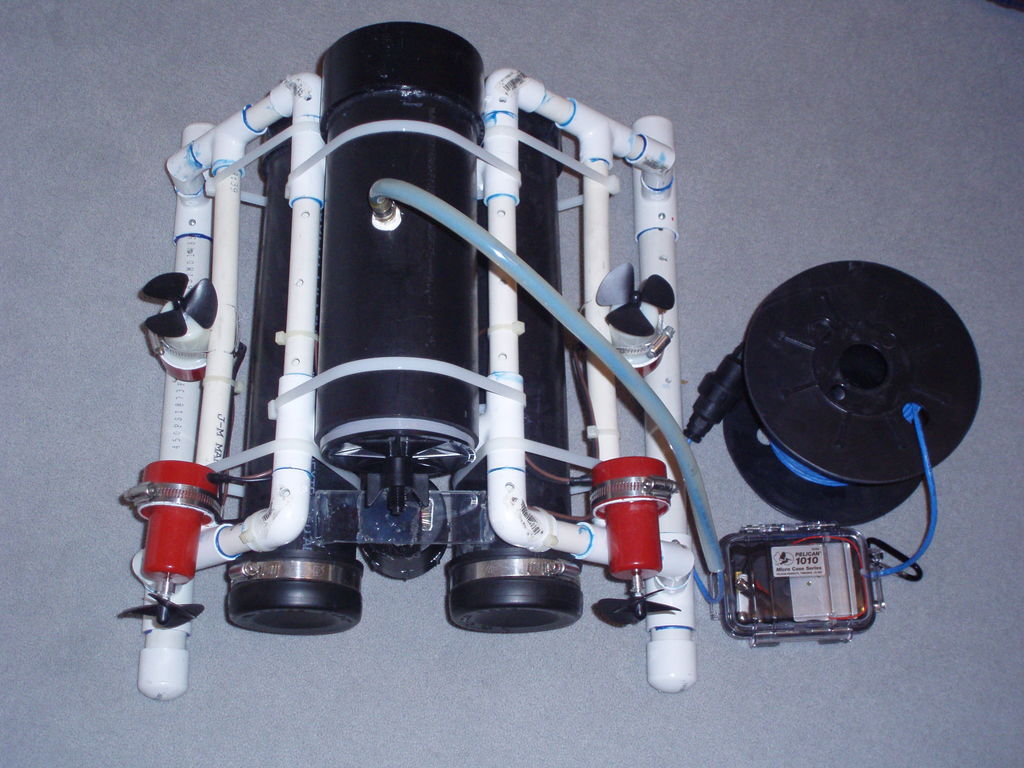
Для того, щоб зберегти плавучість і надати необхідна вага для занурення, автор цього винаходу вирішила зробити свій апарат, що складається з труб різного діаметру : три великі труби посередині, обрамлені трубами маленького розміру.

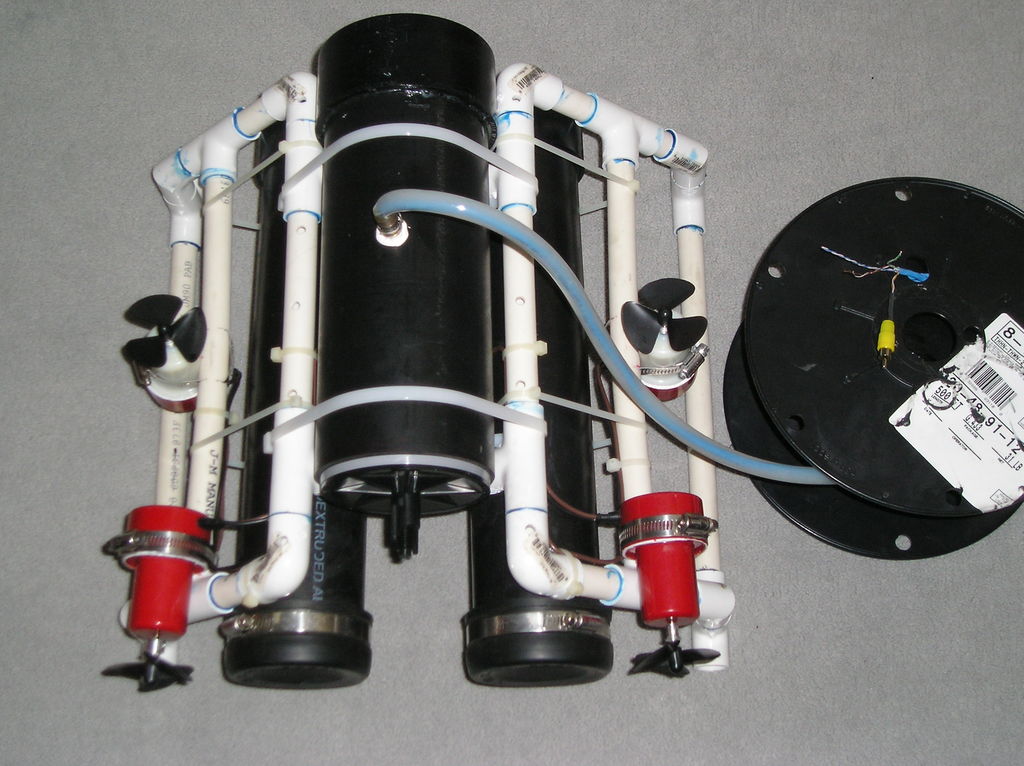
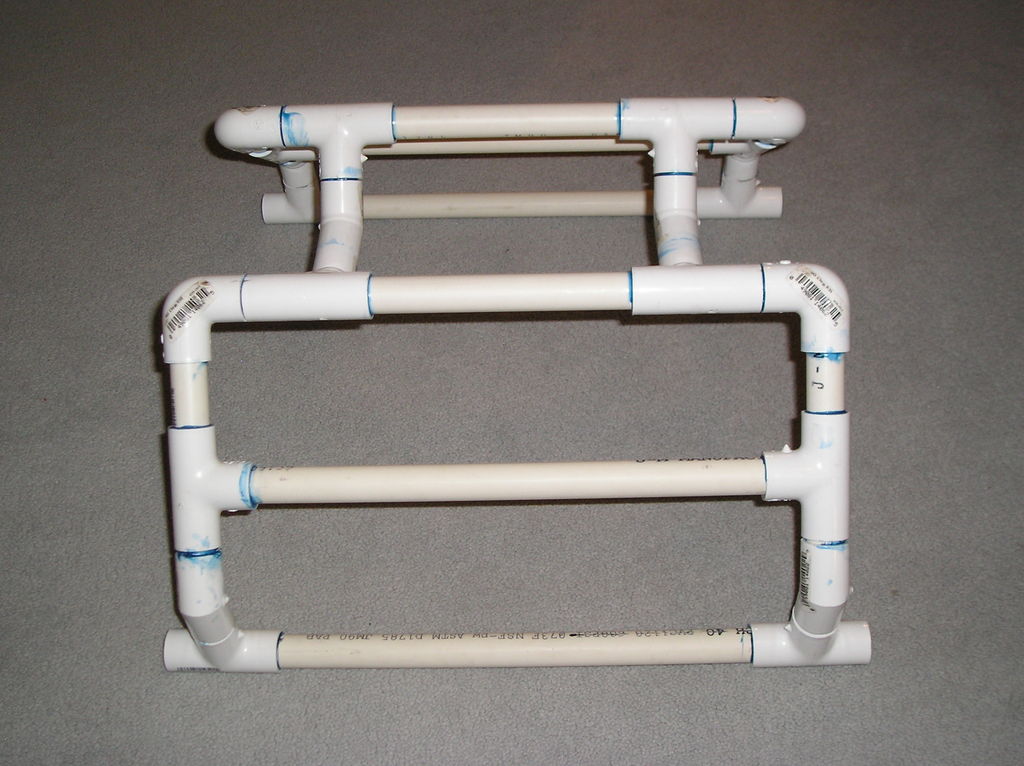
Крок 2 : Рама
Рама складається із звичайних ПВХ труб, призначених для стоків і водопроводу. Великі труби мають діаметр 50 мм, маленькі, призначені для рамки, - 20 мм Для фронтальної сторони труб великого діаметру, призначених для установки усередину устаткування : камер, діодних ліхтариків для підсвічування, необхідно акуратно вирізувати і відшліфувати прозоре оргскло.

Саджаємо оргскло на спеціальний клей-герметик, стійкий до води. Із зворотного боку труби встановлюємо торцеві гумові заглушки і обтискаємо їх хомутами відповідного діаметру. Це забезпечує герметичність і дозволяє нам легко зняти їх у разі потреби ремонту або обслуговування устаткування.

Для виведення кабелів і дротів робимо отвори що відповідають штуцерам для прозорих шланг - водонепроникних каналів для проводки. Штуцера монтуються в труби за допомогою герметика і мають "ялиночку" на кінцях для щільного і герметичного з'єднання з шлангом.

Виходячи з розмірів великих труб, спаюємо маленькі труби спеціальним паяльником в раму, форма якої представлена на картинці. Великі труби фіксуються на рамі пластмасовими хомутами, часто використовуваними електриками для скріплення проводки.
Крок 3: Двигуни
Одна з найбільш важливих складових безпілотного підводного апарату - цей рух. Як засіб тяги було вирішено використати погружні насоси невеликих розмірів - 4 насоси (продуктивністю 4,2 куб.м./годину: 2 для руху вперед/назад і повороту, 2 - для руху вгору/вниз.

Для збільшення тяги автор використав наступний метод: 1. Відрізував білий корпус помпи звільнивши вал насоса. 2. Використовуючи адаптер опори, призначений для кріплення пропелера на валу вертольота, закріпив його на валу насоса і прикрутив до нього гвинт, куплений в інтернет-магазині, який займається продажами кораблів, що комплектують для моделювання, і човнів.



Крок 4: Навігація
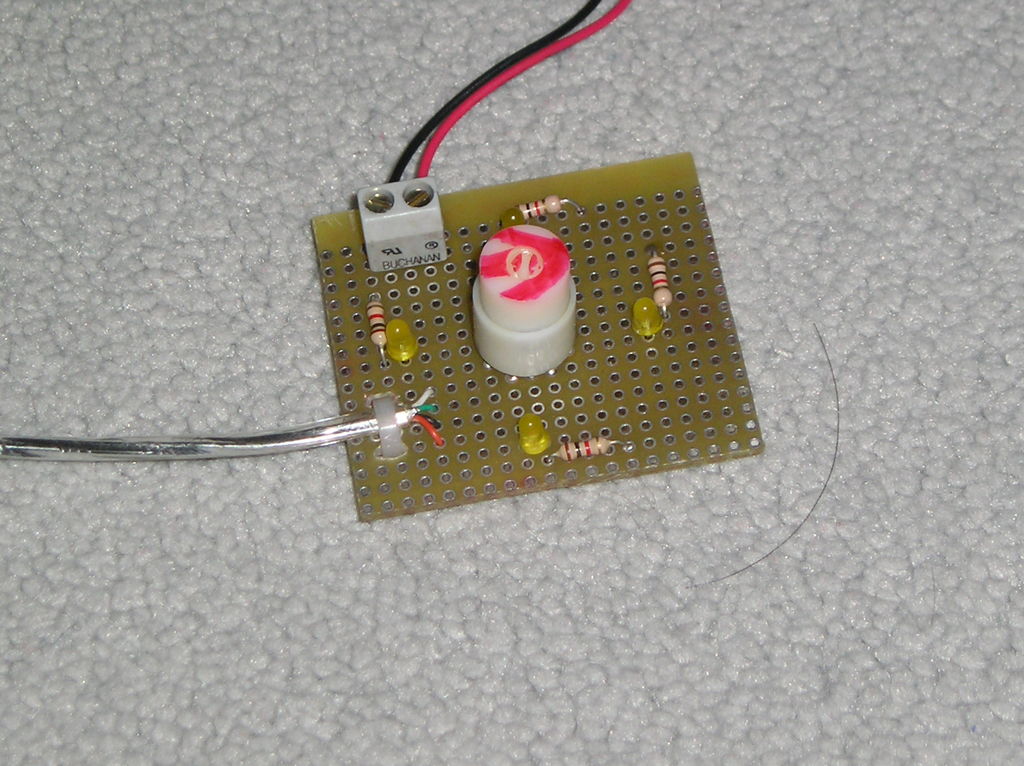
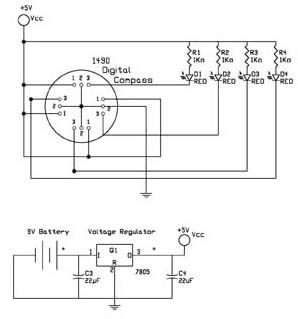
Для точної навігації був використаний електронний компас(на картинці Dinsmore 1490). Головною особливістю цього компаса є первинна самостійна установка позиції Північ. Усі інші напрями автоматично вибудовуються. Цей компас дуже чутливий і сприймає усі зміни в магнітному полі Землі, тому переконаєтеся, що ви досить далеко встановили його від електромагнітів підрулюючих насосів. Чотири дроти в сріблястій обмотці відповідають за передачу сигналів(координат) при зіткненнях в ПК.
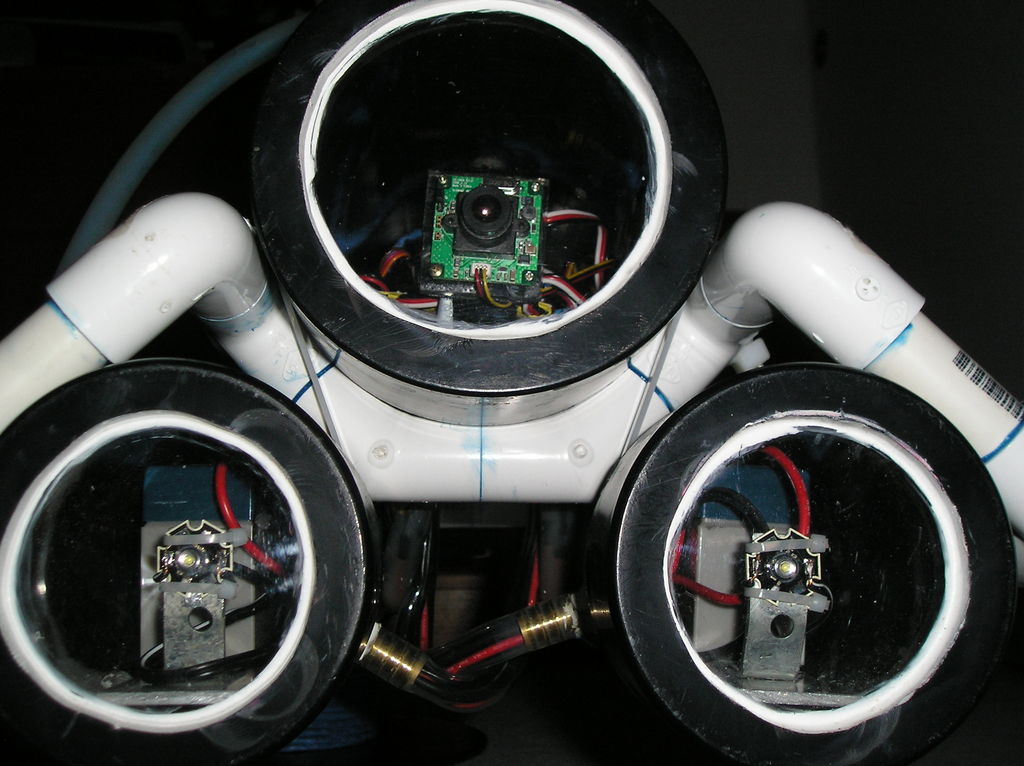
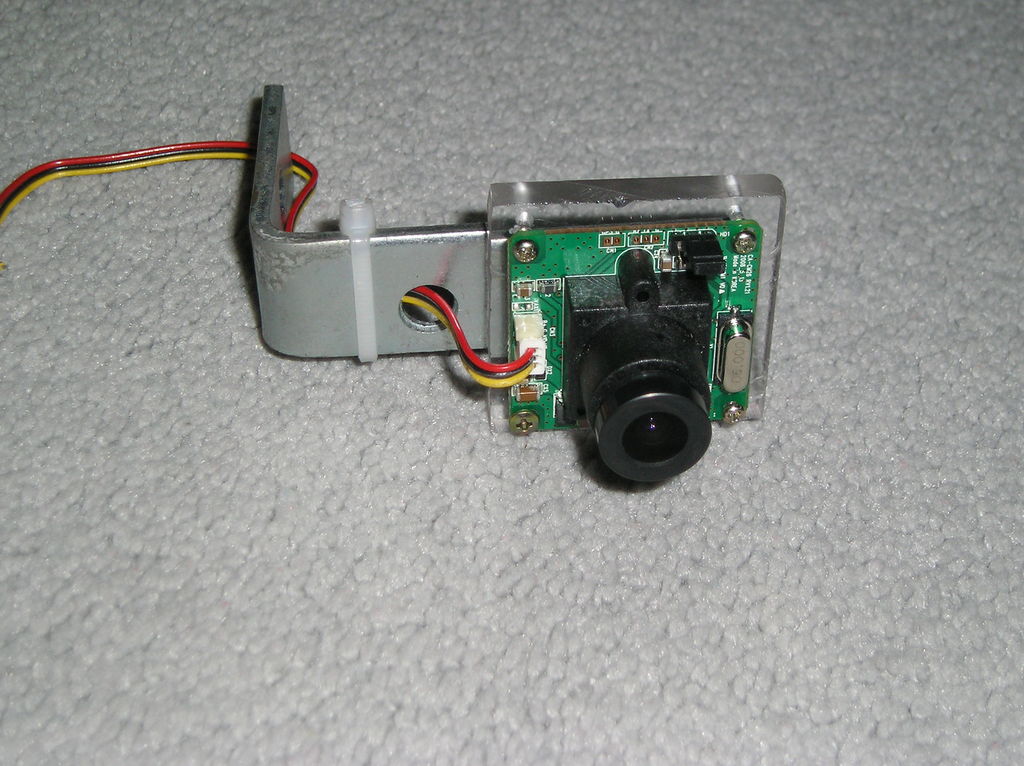
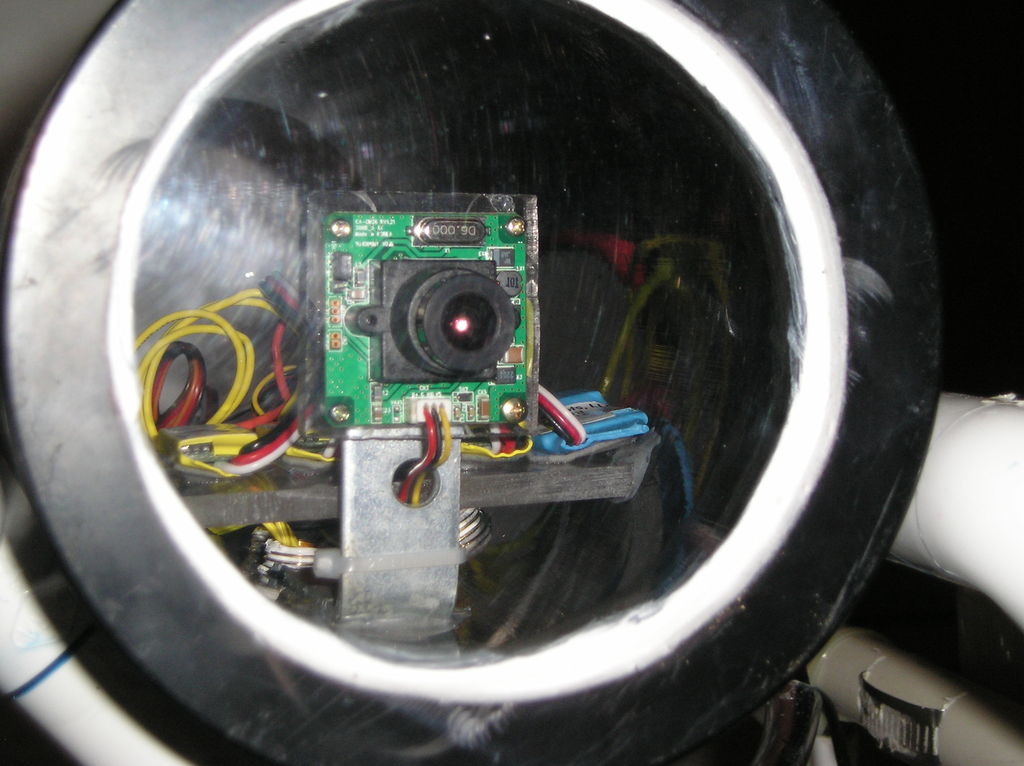
Крок 5: Камери
Щоб мати можливість бачити те, що усе, що відбувається під водою, в підводному апараті просто потрібна камера. Якщо ви зібралися занурюватися глибоко, логічніше буде застосувати чорно-білу інфрачервону камеру. Для невеликих глибин підійде найпростіша кольорова камера з RCA виходом, відповідним для підключення до комп'ютера. Якщо ви дійсно хочете хорошу картинку, вам треба придбати дорожчу камеру з автоматичним перемиканням в режим нічного бачення і зі вбудованою ИК-подсветкой. РС карта підключається до камери через RCA вихід і продається з програмою для перегляду і захоплення відео.

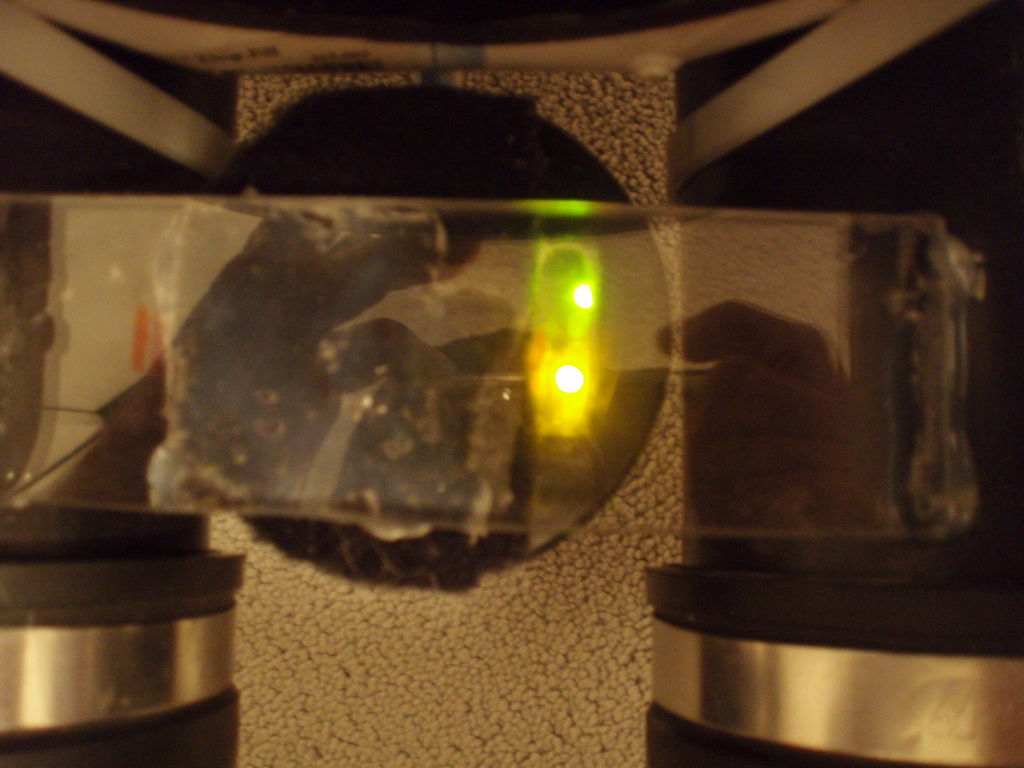
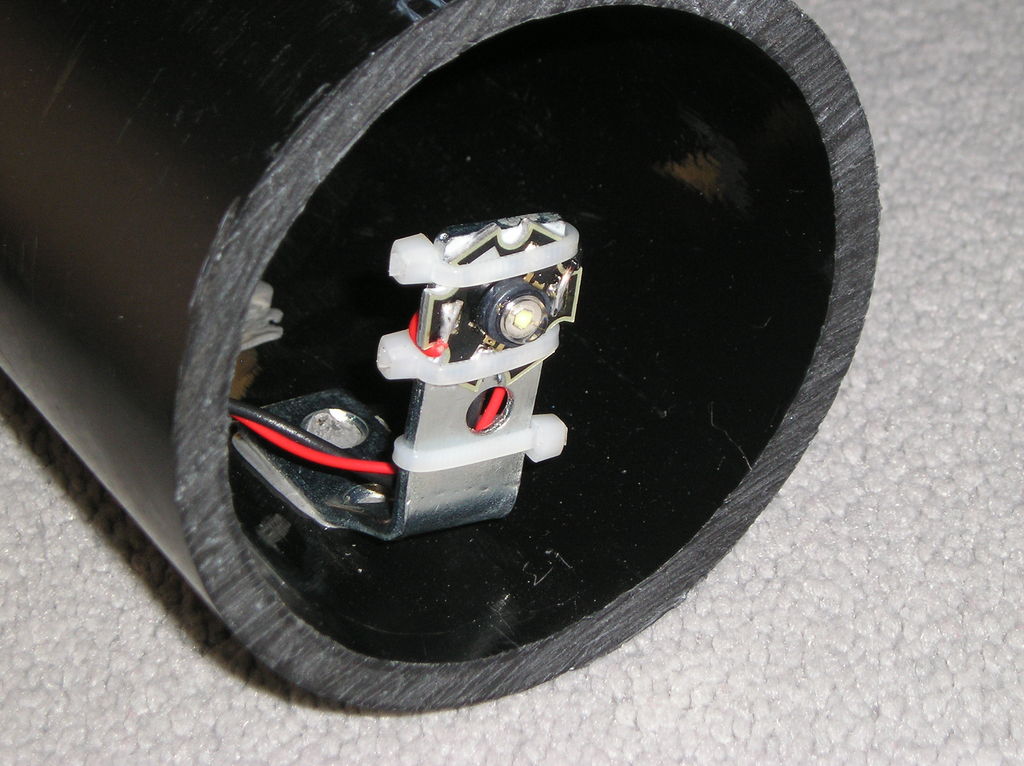
Крок 6: Підсвічування
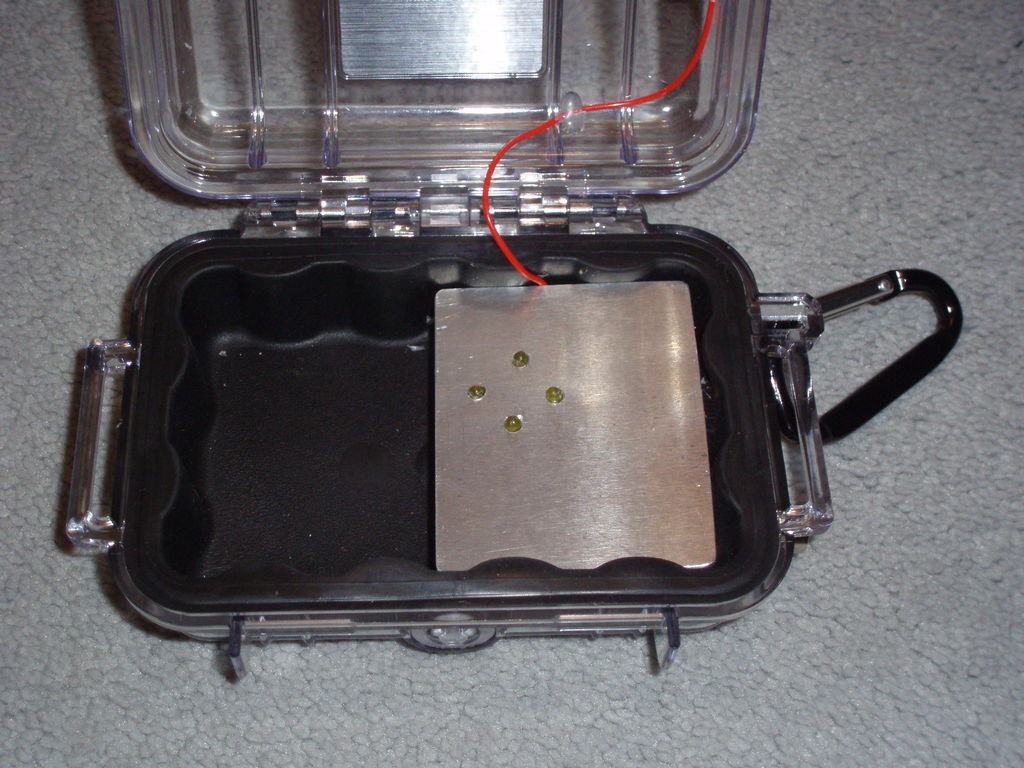
Хороший огляд під товщею води з недостатньою кількістю світла в цьому пристрої забезпечують два потужні світлодіоди потужністю 3 ватів кожен. Світлодіоди різної потужності можна легко придбати в спеціалізованому інтернет-магазині. Діоди випромінюють велику кількість тепла, тому не забудьте використати тепловідвід, який є алюмінієвою пластиною з місцями припою для дротів живлення і самого діода. Для закріплення підсвічування в трубі автор зробив Г-подібні кронштейни, прикріпив хомутами до них пластини зі світлодіодами, а потім приклеїв до внутрішньої поверхні труби приблизно в центрі. На фотографії видно, скільки світла видають світлодіоди в робочому стані. Це більше, ніж досить для підсвічування при зйомці під водою.



Крок 7: Блок управління
Найважча частина усього процесу будівництва - вибір блоку управління. Існує безліч різних підходів до управління безпілотними підводними апаратами. Деякі використовують мікроконтроллер, який є самим кращим засобом. Він має повне аналогове управління усіх двигунів і передачу даних по кабелю Ethernet категорії 5e. В якості альтернативи ви можете використати реле для включення і виключення двигунів з регулюванням швидкості обертання. Це не так зручно, як повний контроль діапазону, але це набагато простіше і дешевше.

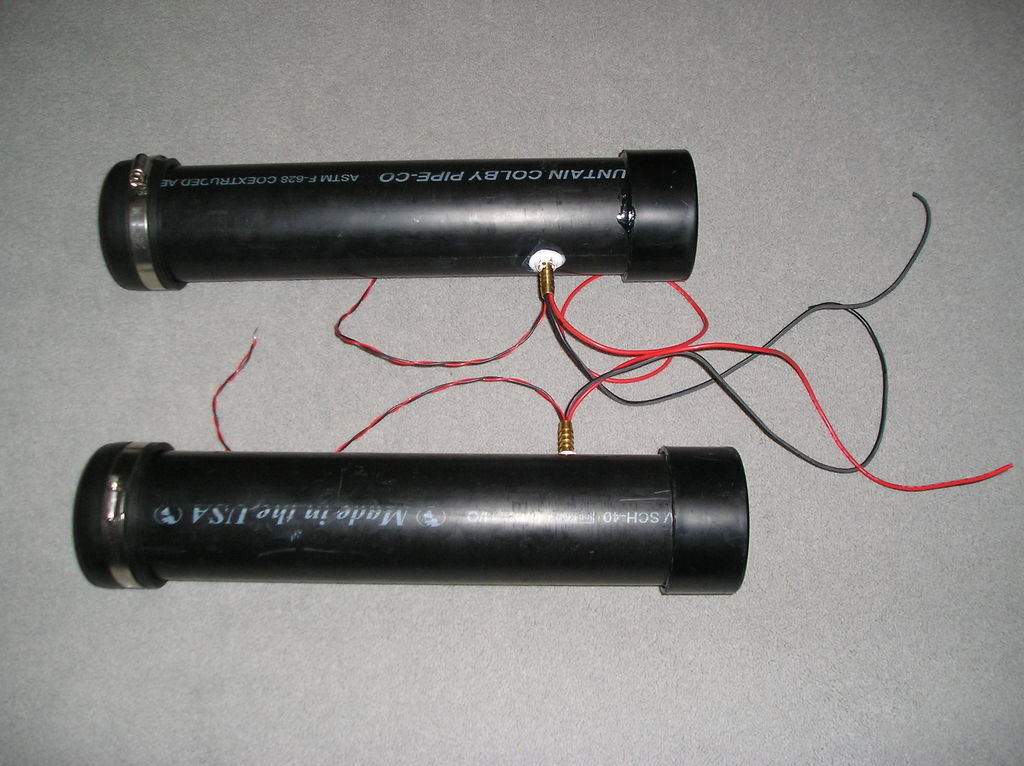
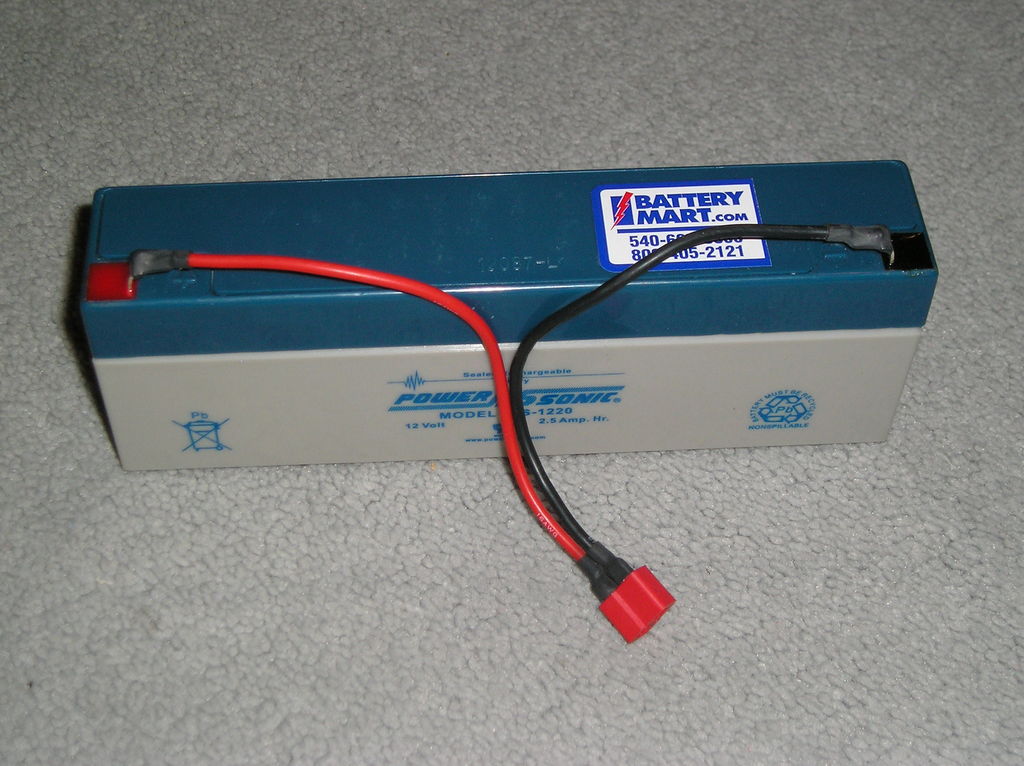
Крок 8: Живлення
Для живлення підводного апарату використовуються 2 батареї Mart, що має напругу 12 вольт і місткість 2,5 ампер-години. Зручний роз'єм підключення у виді папа/мама дозволяє з легкістю зробити демонтаж або заміну устаткування. Зберігаючи баланс апарату, акумулятори були поміщені у бічні труби.
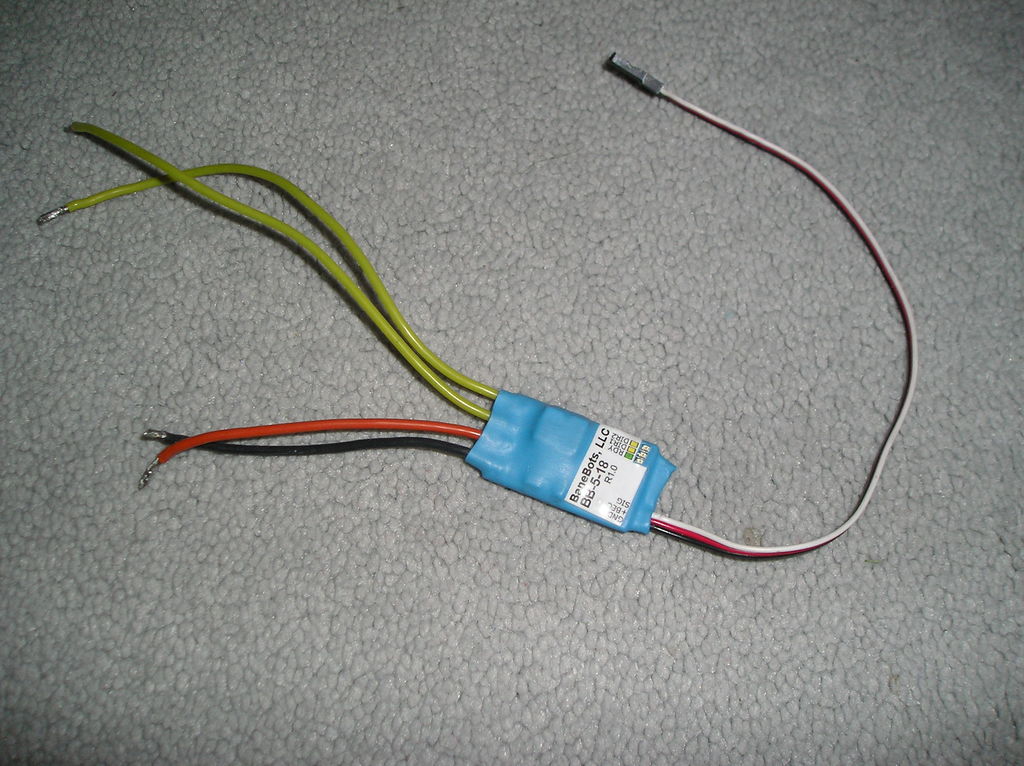
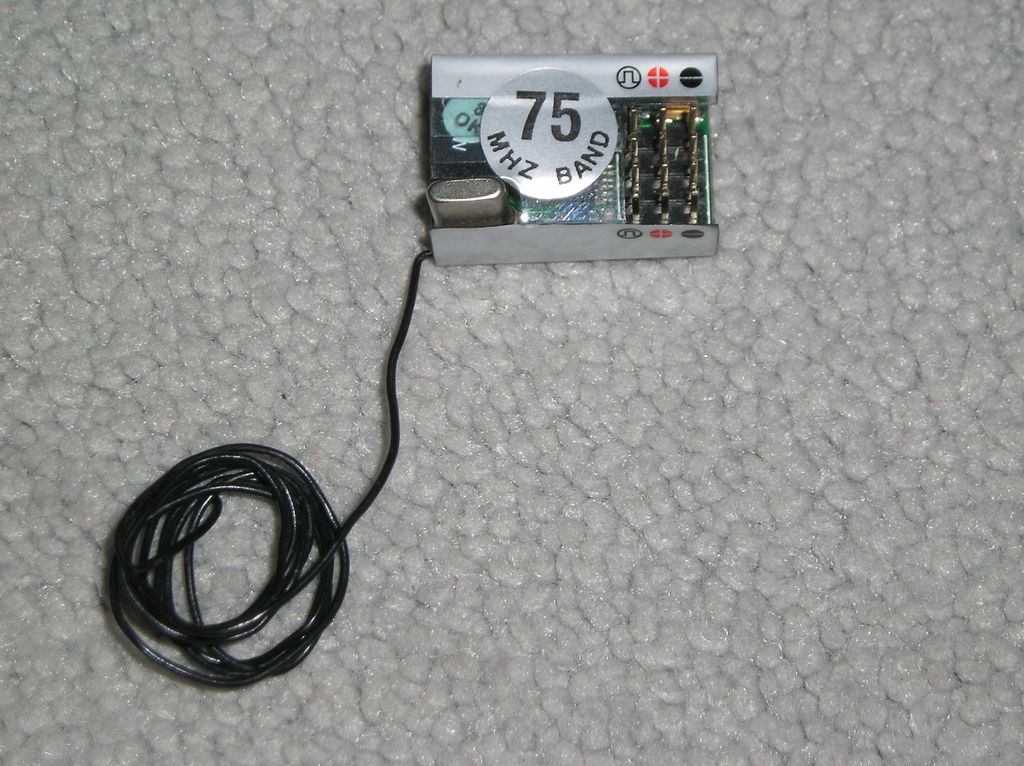
Крок 9: Контроль
Управління і контроль над беспилотником здійснюється за допомогою ноутбука, використовуючи клавіатуру або джойстик для переміщення. Це дуже зручно, тому, що для цього вам знадобиться усього лише кабель управління і ноутбук. Щоб забезпечити аналогове управління за допомогою мікроконтроллера необхідно встановити електронну систему контролю швидкості таку, як використовується в моделях керованих по радіо літаках або автомобілях. Вона підключається до чотирьохканального приймача, що поміщається у всередину апарату, і що має порт для підключення Ethernet 5е кабелю і роз'їм антени. У роле передавача(випромінювача) сигналу виступає пульт дистанційного керування з відповідною робочою частотою. Світло управляється за допомогою перемикача, який активує сервоприводи.



Крок 10: Кабель
Для підключення підводного апарату до контроллера використовується 30 метровий кабель Ethernet(довжина кабелю вибирається самостійно, залежно від розмірів водойми і глибини занурення). Він має 8 дротів, які забезпечують повну кількість каналів передачі даних від пристрою до комп'ютера. Щоб збільшити довжину робочого кабелю не обов'язково міняти дріт. Автор ідеї пропонує використати спеціальний збірній коннектор Bulgin Buccaneer Ethernet, який забезпечує водонепроникне з'єднання двох необхідних шматків дроту.




Висновок:
Розібравшись, як влаштований цей безпілотний підводний апарат, можна з упевненістю сказати, що він не так вже і складений, як здавався спочатку.
Від себе хотілося б додати, що при першому запуску все одно доведеться балансувати і обважнювати агрегат свинцевими грузилами, прикріплюючи їх до полозів рами. Дуже вже легким він здається, але це не проблема. Радує, що є поле для експериментів. Можна легко підібрати і застосувати устаткування і матеріали на свій смак. Зрозуміло, вам доведеться потрудитися, що б знайти і зібрати усі деталі в єдине ціле. Але повірте, це коштує того. Поринути в підводний світ і побачити незвідане мріє кожна людина, але лише трохи, кому це вдається. Станьте першим, доклавши для цього трохи зусиль і засобів.

")

")
")
")
")
")
")
")
")
")
")

")
")