





































Інструкція зі збирання робота MouseBot зі старої комп'ютерної миші.
Зміст:
- Вступ
- Крок 1. Деталі та інструменти
- Крок 2. Підготовка
- Крок 3. Приготуйте корпус
- Крок 4. Зробіть колеса
- Крок 5. Зробіть макет та встановіть реле
- Крок 6. Встановіть кнопку-перемикач
- Крок 7. Побудуйте мозок для Mousebot
- Крок 8. Збудуйте верхню кришку Mousebot
- Крок 9. Приклейте нижні елементи
- Крок 10. Наближаємося до фінішу
Цей дуже простий робот може бути зроблений із недорогих матеріалів, які можна купити у звичайному магазині. Основою цього пристрою є стара комп'ютерна мишка.
Mousebot - простий бот, який використовує два "очі", якими він бачить світло і повертається до нього. Один великий вусик монтується на передній частині комп'ютерної миші для виявлення перешкод. При зіткненні зі стіною миша рухається і повертає в інший бік.
Даний проект є досить дешевим, якщо у вас є стара миша, то решта деталей обійдеться вам менш ніж за десять доларів.

Крок 1. Деталі та інструменти:
Матеріали:
- 1 кулькова мишка
- 2 невеликі двигуни DC
- 1 тумблер
- 1 DPDT 5v реле (підійде також Aromat DS2YE-S-DC5V)
- 1 LM386 мікросхема
- 1 2N3904 або PN2222 NPN транзистор
- 1 LED світлодіод (будь-який колір)
- 1 1 КОМ резистор
- 1 10 кім резистор
- 1 100мФ конденсатор
- 1 касета для магнітофона (були поширені в 80-90 рр.)
- 1 CD-диск
- 1 9V акумуляторне обладнання
- 1 9V батарея
- 2 або 3 широкі гумові смужки
- дроти.

Інструменти:
- Мультиметр
- Хрестова викрутка
- Дремель
- Малі плоскогубці
- Кусачки
- Гострий ніж
- Паяльник
- Будь-який демонтажний інструмент
- Суперклей або епоксидна смола
- Гарячий клей та пістолет для нього
- Ножівка
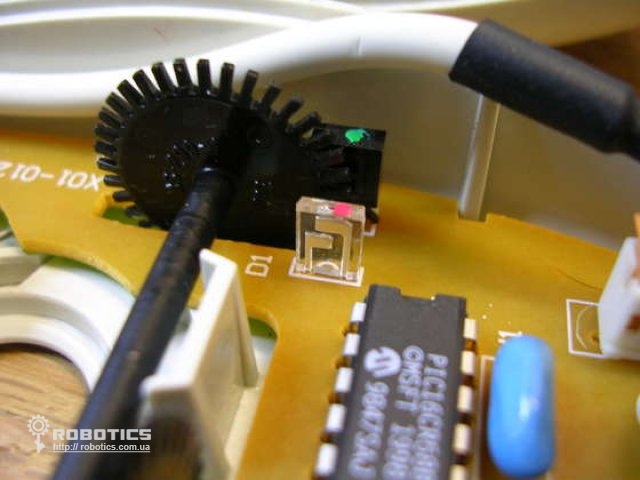
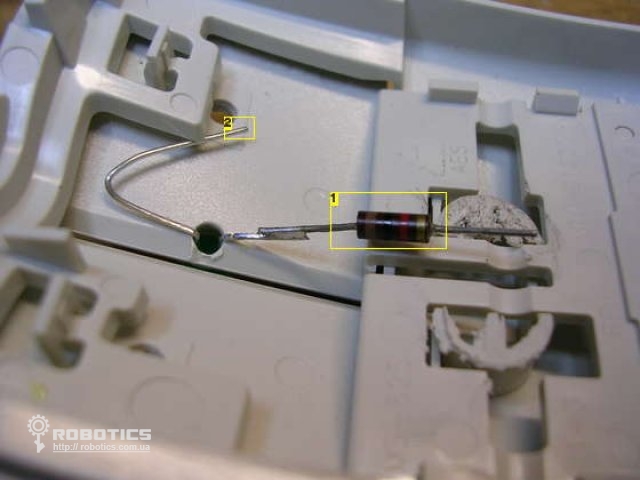
Крок 2. Витягніть деякі деталі з мишки:
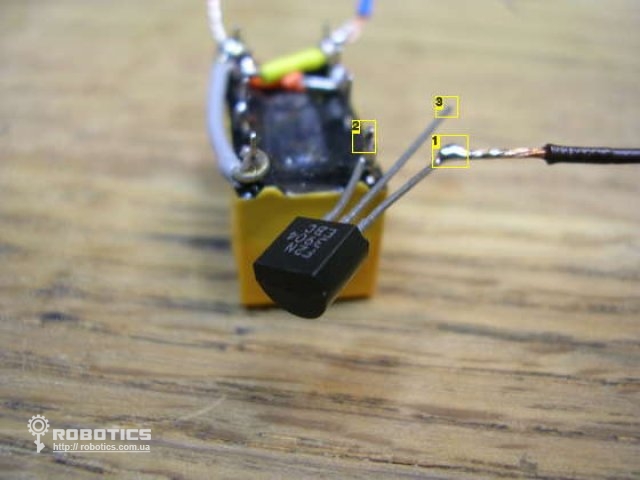
Mousebot виготовляється з корпусу з деякими деталями від комп'ютерної миші, а також додатково очі та вуса. Відкрийте мишу та знайдіть компоненти, які потрібно взяти, а саме перемикач та інфрачервоний випромінювач. Зніміть перемикач PCB та відпаяйте його, як і ІЧ-випромінювачі.

1 - ІЧ-випромінювач; 2 - ІЧ-випромінювач; 3 – перемикач.


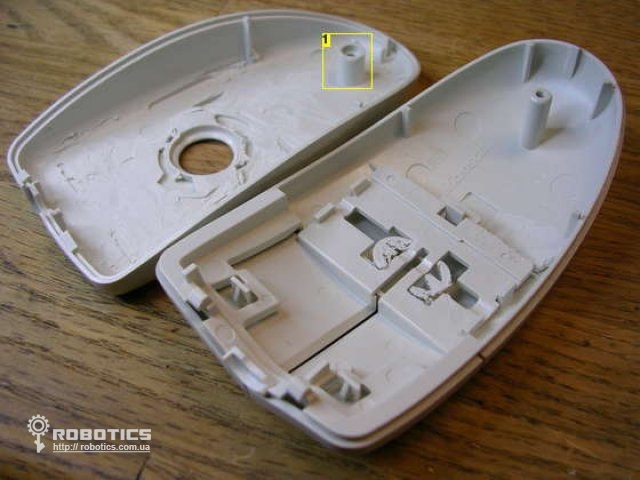
Крок 3. Приготуйте корпус:
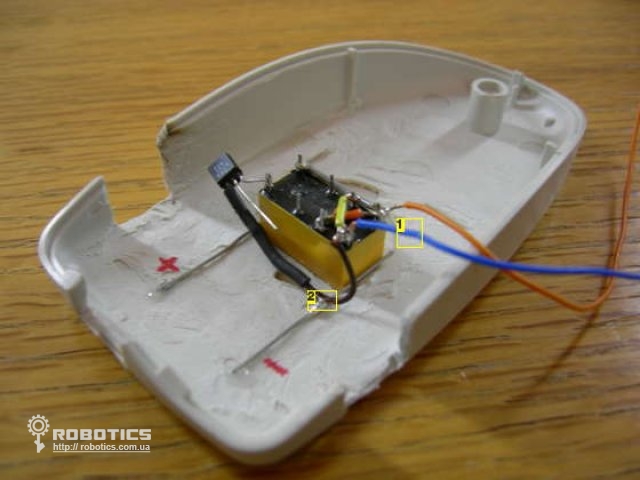
Далі потрібно забезпечити всередині корпусу багато місця, тому за допомогою дремеля потрібно видалити всі внутрішні пластикові структури з верхньої та нижньої частини миші. Якщо ваша миша невелика, можливо, доведеться видалити сполучні шурупи, які тримають дві частини миші разом.
Тепер за допомогою дремеля виріжете отвори для перемикача у передній частині миші та двигунів з боків. Краще використовувати дрімель короткого циліндричного типу, він різатиме якісно під прямим кутом, перебуваючи у вертикальному положенні.

1 - якщо цей сполучний шуруп заважає, видаліть його
Крок 4. Зробіть колеса:
Осі на цих двигунах дуже маленькі, і якщо ми хочемо, щоб Mousebot стабільно рухався на високій швидкості, ми повинні приробити йому пару коліс. Магнітофонні касети мають коліщатка ідеального розміру в правому та лівому кутах. Дістаньте їх і приклейте суперклеєм до осей.

Відріжте гумку і приклейте її до країв, обернувши її навколо коліщатка тричі, додавши суперклей на кожну напівоберту, щоб конструкція трималася разом. Залишки гуми обріжте.

Тепер приклейте іншу гумку до тієї, яку ви щойно клеїли. Виконайте все те саме і відріжте зайве. Переконайтеся, що клею достатньо, щоб гумка надійно трималася. Повторіть цей процес для іншого коліщатка.

1 - додати ще один шар, щоб пом'якшити торкання коліс.
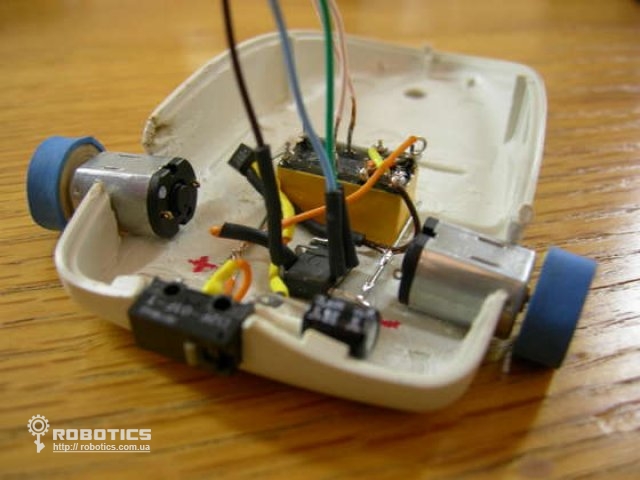
Крок 5. Зробіть макет та встановіть реле:
Є багато хороших макетів для mousebot. Найкраще використовувати стандартну розкладку. Схема миші буде нескладною, оскільки друкована плата не вимагає багато місця.
Встановіть реле та припаяйте дроти, схрестивши їх із сполучними штифтами від 8 до 11 та від 6 до 9.
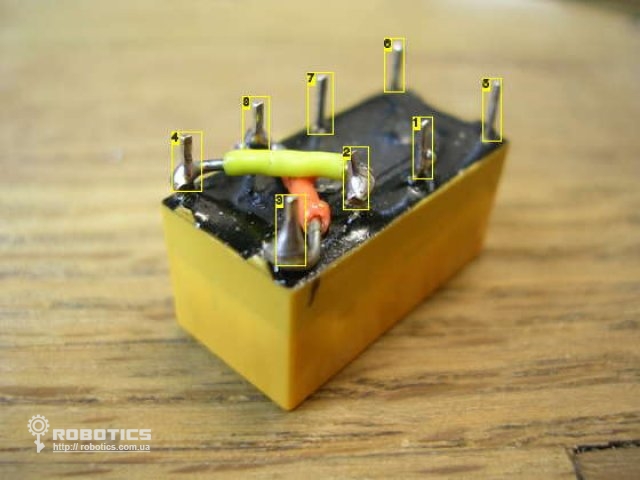
Потім підключіть контакти 1 і 8 за допомогою дроту вздовж корпусу та додайте багатожильний провід для контакту 8 та 9.
Припаяйте колектор транзистора (правий висновок, дивлячись з плоскої сторони) до контакту 16 і прикріпіть короткий кінець. Потім підключіть дроти, які припаяні до контакту 9 (лівий висновок, дивлячись з плоскої сторони), залишаючи трохи волі.
Тепер приклейте реле до корпусу. Тут можна використовувати обрізані проводки як позитивне і негативне полюси напруги, які дозволять позбутися від неполадок в роботі двигуна. Використовуйте гострий ніж, щоб зняти захист з контактного дроту, що з'єднує 9 контакт і випромінювач, і припаяйте його до проводок для живлення. Потім з'єднайте контакт 8 із позитивним полюсом напруги.
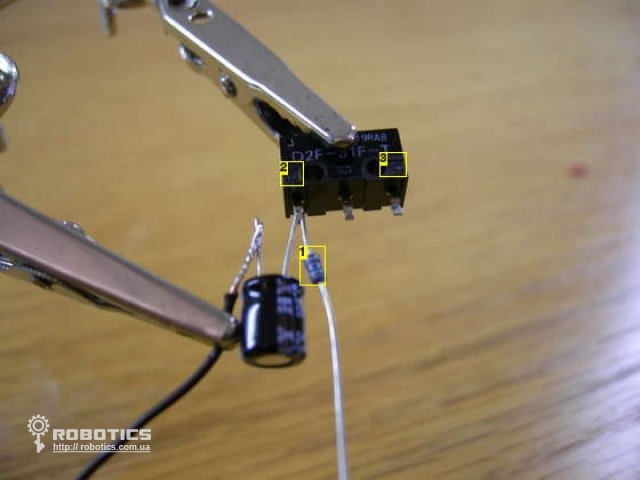
1 - резистор 10 КОм; 2 – зазвичай відкритий контакт; 3 – зазвичай закритий контакт.
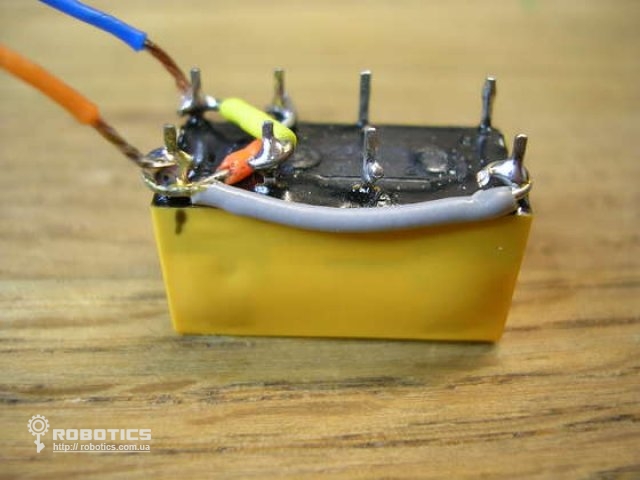
1 - ця миша не має достатньо місця у задній частині, так що встановіть двигун спереду для більш вільної роботи;

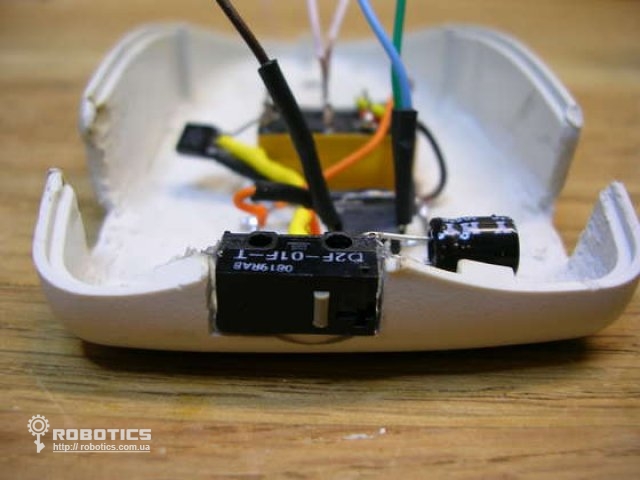
Крок 6. Встановіть кнопку-перемикач:
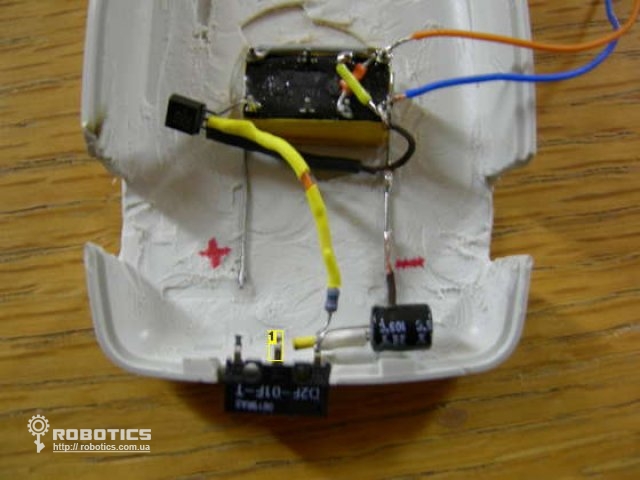
Тепер додайте Mousebot вусик. Зробіть це за допомогою припою позитивного виведення конденсатора та резистора 10 КОМ до кінця, який, як правило, відкритий. Ви можете перевірити, яка сторона є відкритою частиною перемикача кнопки за допомогою функції перевірки безперервності мультиметра. Не має бути жодного зв'язку між середнім та нормально відкритим контактом, поки кнопка натиснута. Після цього додайте багатожильний провід для заземлення конденсатора та центральний контакт перемикача.
1- це з'єднується з напрямним кінцем
Підключіть резистор на комутаторі до основи (центральний контакт) транзистора та дроту від зовнішньої сторони конденсатора . Потім підключіть середній контакт до позитивного полюса напруги. Для того, щоб ваші з'єднання були більш безпечними, потрібно використовувати термозбіжні трубки для ізоляції з'єднань і зігнути конденсатор убік, щоб звільнити трохи місця.
Крок 7. Побудуйте мозок для Mousebot:
Мозок для Mousebots – це мікросхема LM386. Переверніть її контактами вгору і зігніть контакти 1 і 8, щоб вони торкалися і припаяйте.

Тепер помістіть 386 у корпус і підключіть висновок 4 і контакт 6 з кінцем (+) і додайте багатожильний провід на контакти 2, 3 та 5.
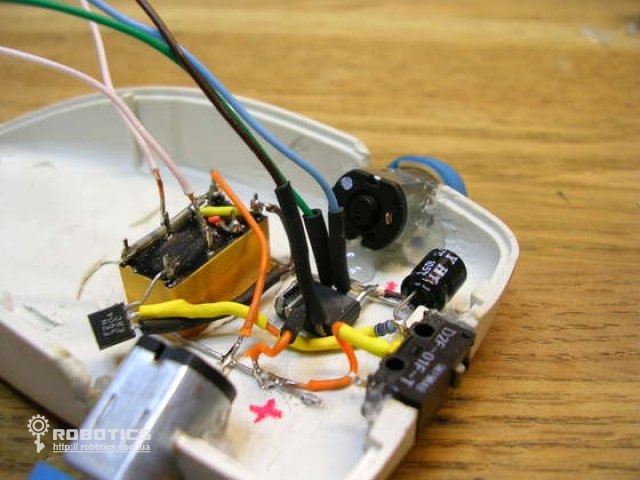
Ми майже готові до підключення двигунів. Залишилося припаяти деякі багатожильні дроти до контактів 4 і 13 реле.
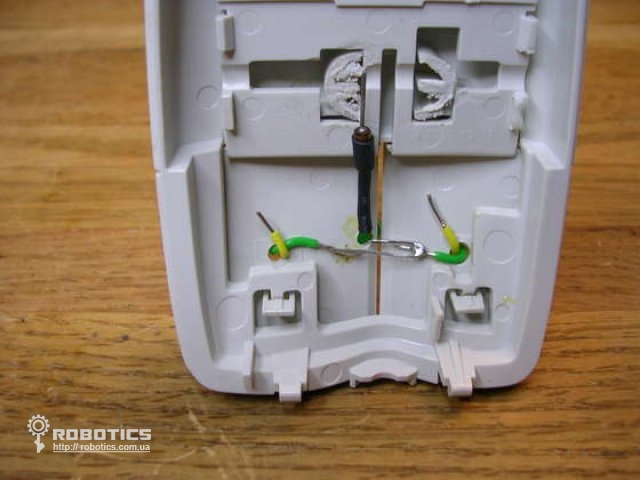
Крок 8. Побудуйте верхню половину Mousebot:
Спочатку просвердліть невеликі отвори в передній частині миші, два для очей та одне для світлодіода (LED).

Потім просвердліть великий отвір для тумблера на задній частині миші та встановіть перемикач, щоб працювала функція увімк/викл у хвості робота.

Щоб створити очні стеблинки для робота, скрутіть два шматки дроту разом і припаяйте ІЧ-випромінювач на одному кінці.

Встановіть світлодіод у середині отвору та з'єднайте позитивний кінець до резистора 1 КОм.
1 - резистор 1 КОм; 2 - GND кінець світлодіода.
Далі перевірте діоди мультиметром, щоб знайти контакти ІЧ-випромінювачів та підключити їх до проводу світлодіода.
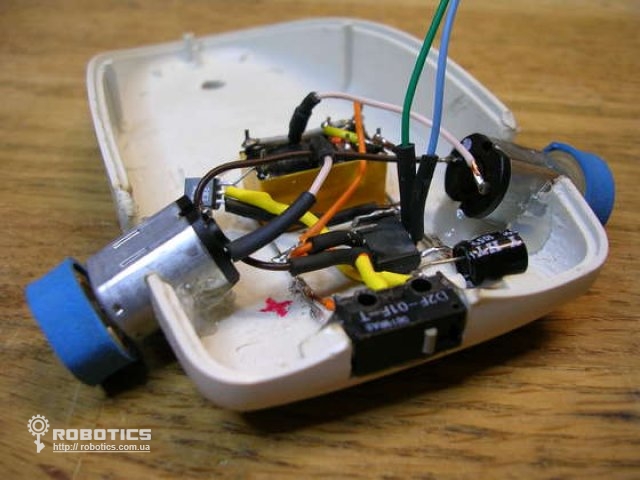
Крок 9. Приклейте нижні елементи:
Використовуйте гарячий клей або епоксидну смолу, щоб надійно закріпити перемикач та двигуни до шасі мишки. Переконайтеся, що кут двигуна приблизно прямий, а далі підніміть передню частину мишки трохи від землі.
Крок 10. Наближаємося до фінішу:
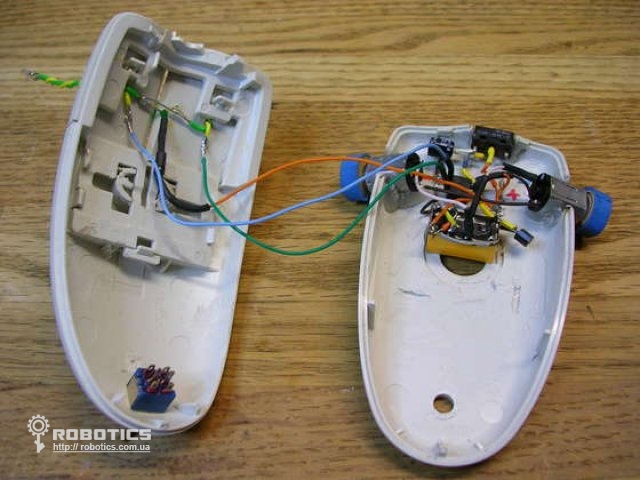
Підключіть контакт 13 реле до лівого двигуна та контакт 4 реле до правого двигуна. Тепер підключіть виведення 5 інтегральної схеми до нижнього з'єднання та двигунів. Якщо ви не впевнені, яка сторона є +, а яка – підключити двигун до батареї, і слідкуйте за напрямком обертань. Правий двигун повинен крутитися за годинниковою стрілкою, якщо дивитися на колесо, а лівий повинен обертатися проти годинникової стрілки.
Знайдіть провід, що йде від контакту 2 (зелений) + до кінця лівого стеблинка ока і від контакту 3 (синій) + до кінця правого стеблинка ока. Потім підключіть резистор 1КОм до напрямку напруги +.
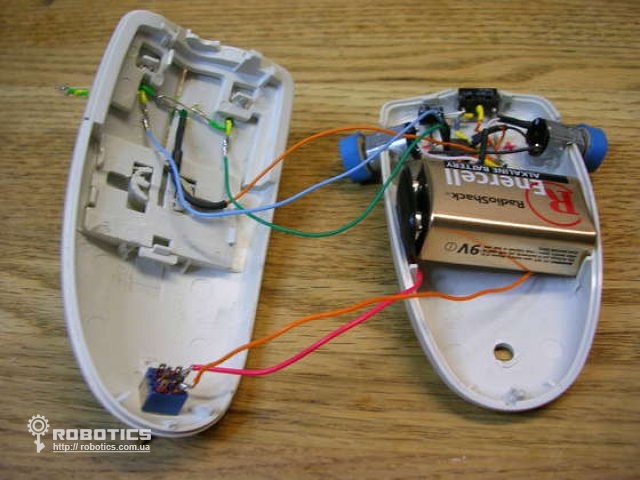
Підключіть акумулятор, припаяйте чорний провід до кришки відсіку батареї до негативного полюса напруги. Підключіть червоний провід до кришки відсіку батареї до комутатора, а потім підключіть вимикач до напруги +.

Закрийте кришку миші, а потім виріжте тонку смужку від гумового матеріалу за допомогою ножівки. Приклейте смужку з одного боку, так що чинити тиск при натисканні кнопок. Якщо у вас є смужка, яка «плескає себе по спині», то ви все зробили.

Тепер поверніть вимикач та насолоджуйтесь!

")

")
")
")
")
")
")
")
")
")
")

")
")