


























")











Инструкция по сборке робота MouseBot из старой компьютерной мыши.
Содержание:
- Введение
- Шаг 1. Детали и инструменты
- Шаг 2. Подготовка
- Шаг 3. Приготовьте корпус
- Шаг 4. Сделайте колеса
- Шаг 5. Сделайте макет и установите реле
- Шаг 6. Установите кнопку-переключатель
- Шаг 7. Постройте мозг для Mousebot
- Шаг 8. Постройте верхнюю крышку Mousebot
- Шаг 9. Приклейте нижние элементы
- Шаг 10. Близимся к финишу
Введение:
Этот очень простой робот может быть сделан из недорогих материалов, которые можно купить в обычном магазине. Основой данного устройства является старая компьютерная мышка.
Mousebot - простой бот, который использует два "глаза", которыми он видит свет и поворачивается к нему. Один большой «усик» монтируется на передней части компьютерной мыши для обнаружения препятствий. При столкновении со стеной мышь движется назад и поворачивает в другую сторону.
Данный проект является довольно дешевым, если у вас есть старая мышь, то остальные детали обойдутся вам менее чем за десять долларов.

Шаг 1. Детали и инструменты:
Материалы:
- 1 шариковая мышка
- 2 небольших двигатели DC
- 1 тумблер
- 1 DPDT 5v реле (подойдет также Aromat DS2YE-S-DC5V)
- 1 LM386 микросхема
- 1 2N3904 или PN2222 NPN транзистор
- 1 LED светодиод (любой цвет)
- 1 1 КОм резистор
- 1 10 КОм резистор
- 1 100мФ конденсатор
- 1 кассета для магнитофона (были распространены в 80-90 гг)
- 1 CD-диск
- 1 9V аккумуляторное оснащение
- 1 9V батарея
- 2 или 3 широкие резиновые полоски
- 22 или 24 провода.

Инструменты:
- Мультиметр
- Крестовая отвертка
- Дремель
- Малые плоскогубцы
- Кусачки
- Острый нож
- Паяльник
- Любой демонтажный инструмент
- Суперклей или эпоксидная смола
- Горячий клей и пистолет для него
- Ножовка
Шаг 2. Вытащите некоторые детали из мышки:
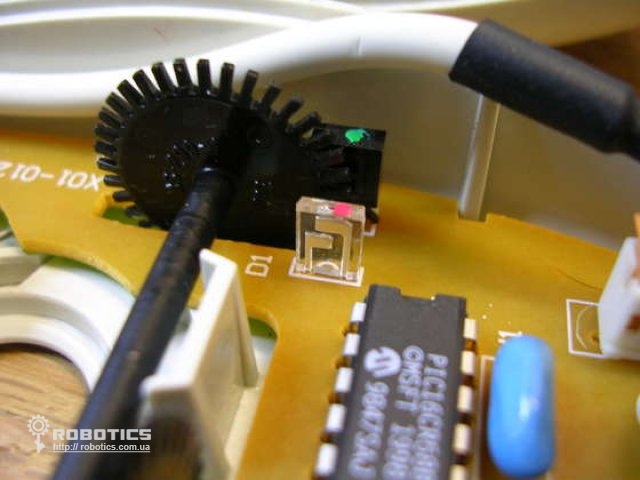
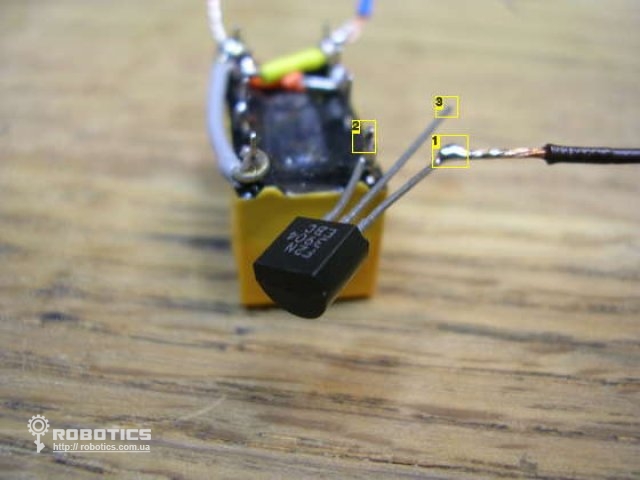
Mousebot изготавливается из корпуса с некоторыми деталями от компьютерной мыши, а также дополнительно глаза и усы. Откройте мышь и найдите компоненты, которые нужно взять, а именно переключатель и инфракрасный излучатель. Снимите переключатель PCB и отпаяйте его, как и ИК-излучатели.

1 - ИК-излучатель; 2 - ИК-излучатель; 3 – переключатель.


Шаг 3. Приготовьте корпус:
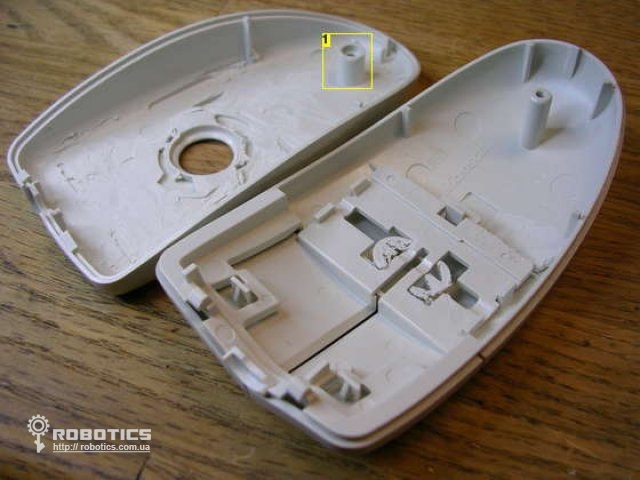
Далее нужно обеспечить внутри корпуса много места, поэтому с помощью Дремеля нужно удалить все внутренние пластиковые структуры с верхней и нижней части мыши. Если ваша мышь небольшая, возможно, придется удалить соединительные шурупы, которые держат две части мыши вместе.
Теперь с помощью дремеля вырежете отверстия для переключателя в передней части мыши и двигателей по бокам. Лучше использовать дремель короткого цилиндрического типа, он будет резать качественно под прямым углом, находясь в вертикальном положении.

1 - если этот соединительный шуруп мешает, удалите его
Шаг 4. Сделайте колеса:
Оси на этих двигателях очень маленькие, и если мы хотим, чтобы Mousebot стабильно двигался на высокой скорости, мы должны приделать ему пару колес. Магнитофонные кассеты имеют колесики идеального размера в правом и левом углах. Достаньте их и приклейте суперклеем к осям.

Отрежьте резинку и приклейте её к краям, обернув её вокруг колесика три раза, добавив суперклей на каждый полу-оборот, чтобы конструкция держалась вместе. Остатки резины обрежьте.

Теперь приклейте другую резинку к той, которую вы только что клеили. Выполните всё то же самое и отрежьте лишнее. Убедитесь в том, что клея достаточно, чтобы резинка надежно держалась. Повторите этот процесс для другого колесика.

1 - добавить ещё один слой, чтоб смягчить касания колес.
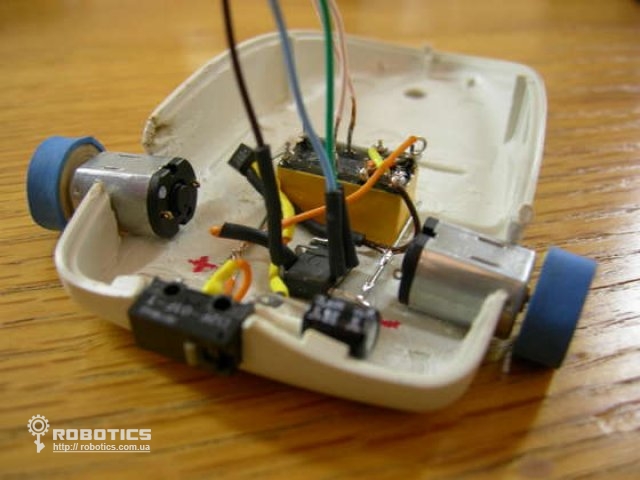
Шаг 5. Сделайте макет и установите реле:
Есть немало хороших макетов для mousebot. Лучшего всего использовать стандартную раскладку. Схема мыши будет несложной, так как печатная плата не требует много места.
Установите реле и припаяйте провода, скрестив их с соединительными штифтами от 8 до 11 и от 6 до 9.
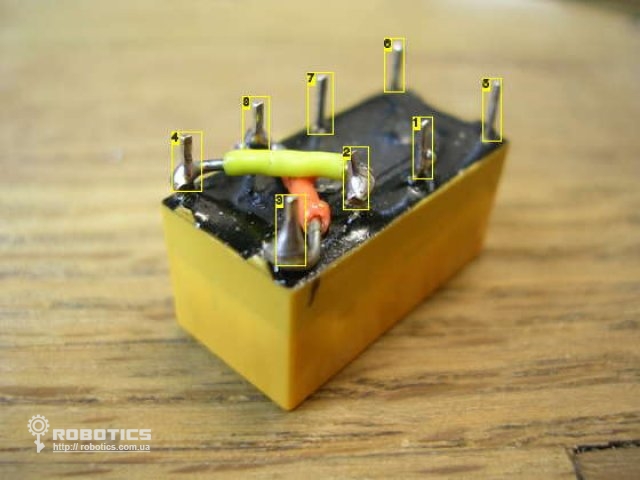
Затем подключите контакты 1 и 8 с помощью проволоки вдоль корпуса и добавьте многожильный провод для контакта 8 и 9.
Припаяйте коллектор транзистора (правый вывод, глядя с плоской стороны) к контакту 16 и прикрепите короткий конец. Затем подключите провода, которые припаяны к контакту 9 (левый вывод, глядя с плоской стороны), оставляя немного свободы.
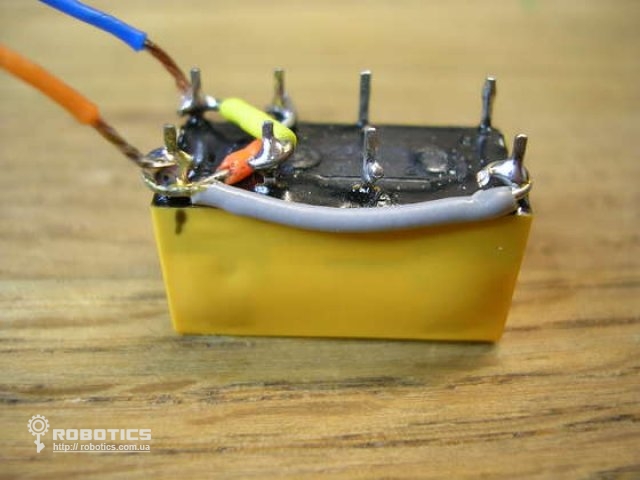
Теперь приклейте реле к корпусу. Здесь можно использовать обрезанные проводки в качестве положительного и отрицательного полюсов напряжения, которые позволят избавиться от неполадок в работе двигателя. Используйте острый нож, чтобы снять защиту с контактного провода, соединяющего 9 контакт и излучатель, и припаяйте его к проводкам для питания. Затем соедините контакт 8 с положительным полюсом напряжения.
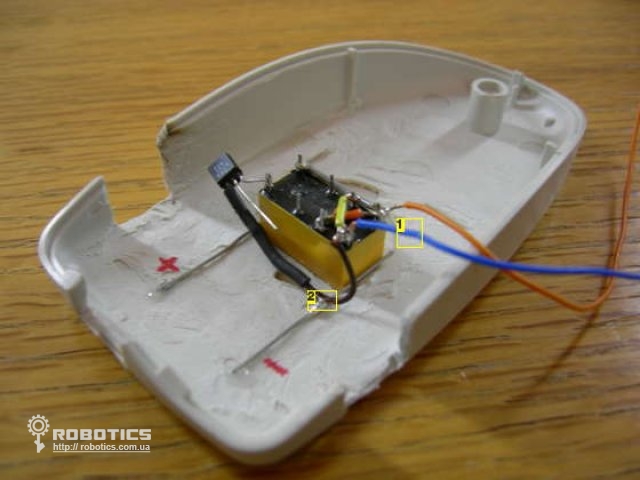
1 – резистор 10 КОм; 2 – обычно открытый контакт; 3 – обычно закрытый контакт;
1 - эта мышь не имеет достаточно места в задней части, так что установите двигатель спереди для более свободной его работы;

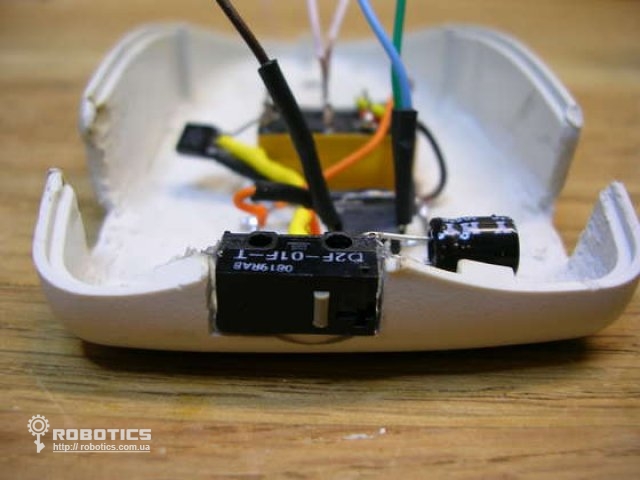
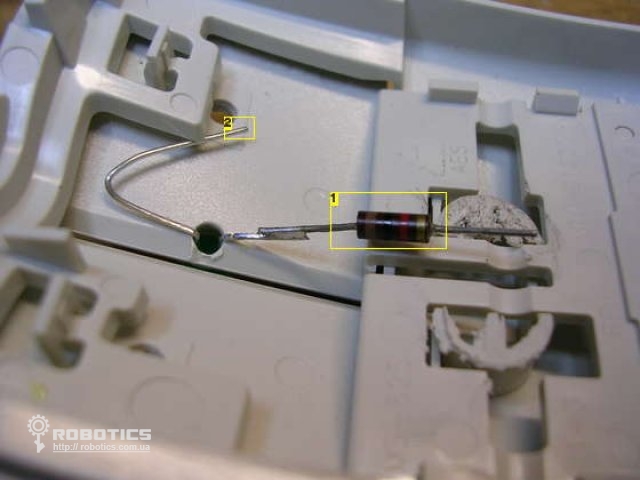
Шаг 6. Установите кнопку-переключатель:
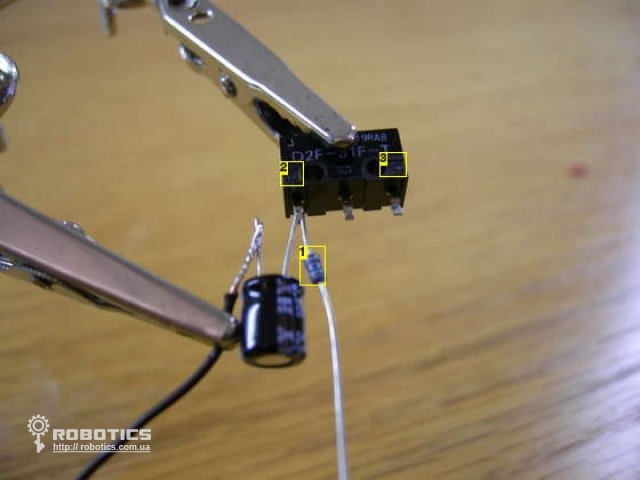
Теперь добавьте Mousebot усик. Сделайте это с помощью припоя положительного вывода конденсатора и резистора 10 КОм до конца, который, как правило, открыт. Вы можете проверить, какая сторона является открытой частью кнопочного переключателя с помощью функции проверки непрерывности мультиметра. Не должно быть никакой связи между средним и нормально открытым контактом, пока кнопка нажата. После этого добавьте многожильный провод для заземления конденсатора и центральный контакт переключателя.
1- это соединяется с направляющим концом
Подключите резистор на коммутаторе к основанию (центральный контакт) транзистора и провода от внешней стороны конденсатора . Затем подключите средний контакт к положительному полюсу напряжения. Для того, чтобы ваши соединения были более безопасными, нужно использовать термоусадочные трубки для изоляции соединений и согнуть конденсатор в сторону, чтобы освободить немного места.
Шаг 7. Постройте мозг для Mousebot:
Мозг для Mousebots – это микросхема LM386. Переверните её контактами вверх и согните контакты 1 и 8, так чтобы они касались и припаяйте.

Теперь поместите 386 в корпус и подключите вывод 4 и контакт 6 с концом (+) и добавьте многожильный провод на контакты 2, 3 и 5.
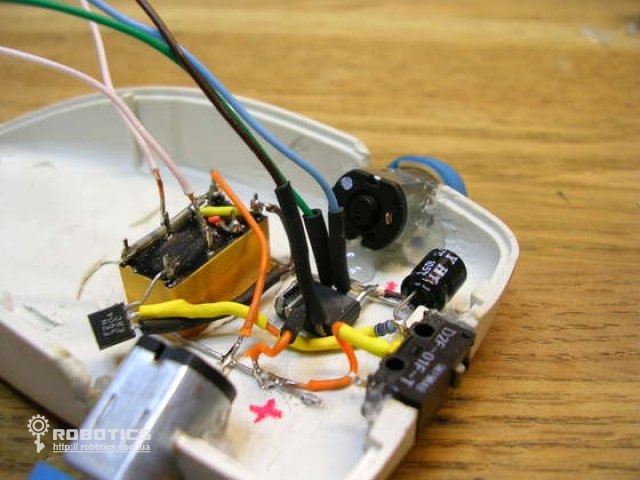
Мы почти готовы для подключения двигателей. Осталось припаять некоторые многожильные провода к контактам 4 и 13 реле.
Шаг 8. Постройте верхнюю половину Mousebot:
Сначала просверлите небольшие отверстия в передней части мыши, два для глаз и одно для светодиода (LED).

Затем просверлите большое отверстие для тумблера на задней части мыши и установите переключатель, чтобы работала функция вкл/выкл в хвосте робота.

Чтобы создать глазные стебельки для робота, скрутите два куска проволоки вместе и припаяйте ИК-излучатель на одном конце.

Установите светодиод в середине отверстия и соедините положительный конец к резистору 1 КОм.
1 – резистор 1 КОм; 2 – GND конец светодиода.
Далее проверьте диоды мультиметром, чтобы найти контакты ИК-излучателей и подключить их к проводу светодиода.
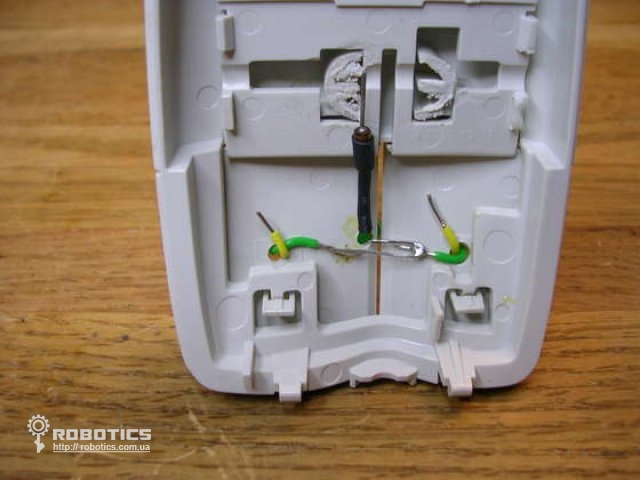
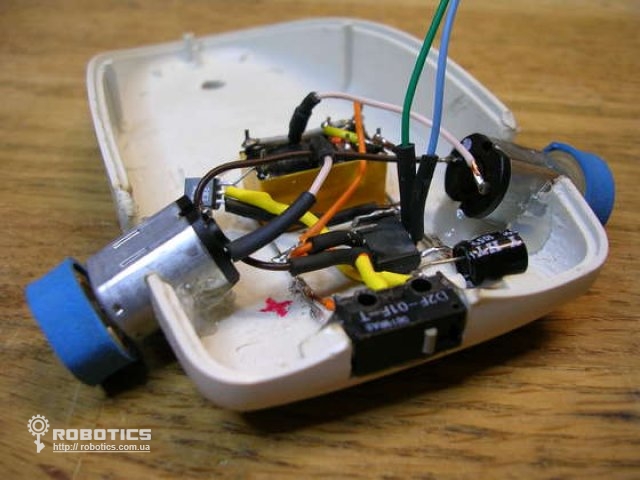
Шаг 9. Приклейте нижние элементы:
Используйте горячий клей или эпоксидную смолу, чтобы надежно закрепить переключатель и двигатели к шасси мышки. Убедитесь, что угол двигателя приблизительно прямой, а дальше приподнимите переднюю часть мышки незначительно от земли.
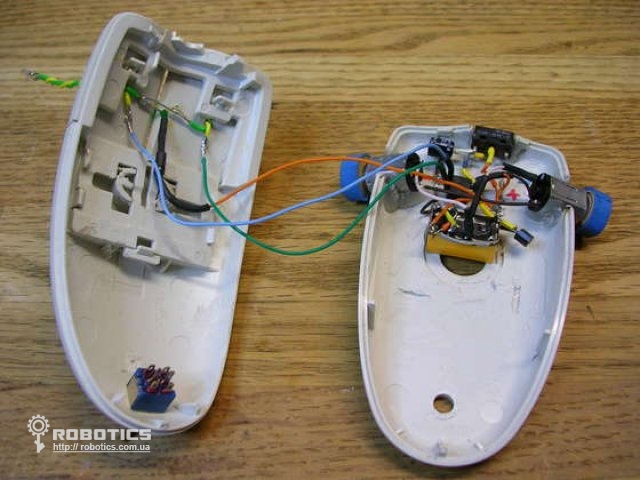
Шаг 10. Близимся к финишу:
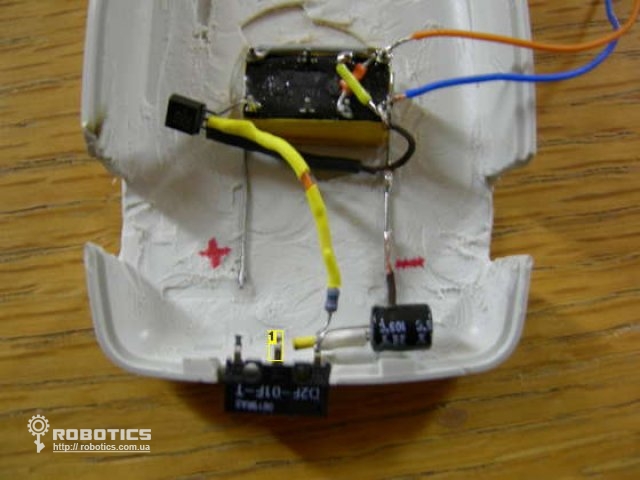
Подключите контакт 13 реле к левому двигателю и контакт 4 реле к правому двигателю. Теперь подключите вывод 5 интегральной схемы к нижнему соединению и двигателям. Если вы не уверены, какая сторона является +, а какая –, подключить двигатель к батарее, и следите за направлением вращений. Правый двигатель должен крутиться по часовой стрелке, если смотреть на колесо, а левый должен вращаться против часовой стрелки.
Найдите провод, идущий от контакта 2 (зеленый) + к концу левого стебелька глаза и от контакта 3 (синий) + к концу правого стебелька глаза. Затем подключите резистор 1КОм к направлению напряжения +.
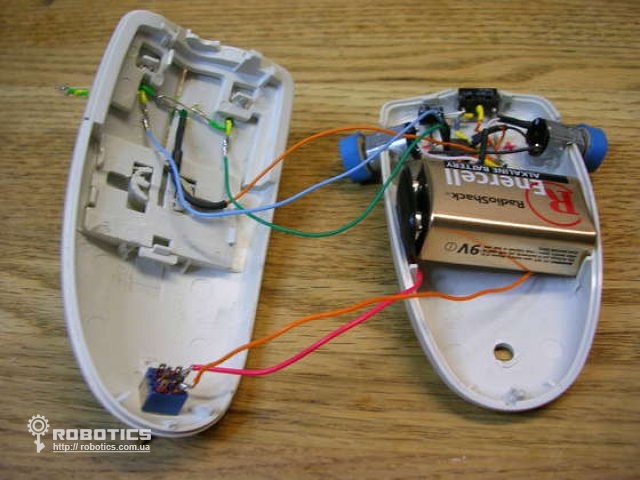
Подключите аккумулятор, припаяйте черный провод к крышке батарейного отсека к отрицательному полюсу напряжения. Подключите красный провод к крышке батарейного отсека к коммутатору, а затем подключите выключатель к напряжению +.

Закройте крышку мыши, а затем вырежьте тонкую полоску от резинового материала с помощью ножовки. Приклейте полоску с одной стороны, так что бы оказывать давление при нажатии кнопок. Если у вас есть полоска, которая «хлопает себя по спине», значит вы всё сделали.

Теперь поверните выключатель и наслаждайтесь!

")

")
")
")
")
")
")
")
")
")
")

")
")