

















")













")











Исследователи посвятили участников конференции ICRA Robotics в процесс создания эластичных датчиков для роботов
Специалисты Мюнхенского Института Робототехники и Машинного Интеллекта (MIRM) при техническом университете (TUM) представили процесс создания инновационных мягких датчиков. Распределенный сенсор внутри оболочки обладает различными измерительными свойствами. Такие датчики можгут окутывать поверхность практически любого объекта. Основными областями применения этой передовой технологии являются робототехника и протезирование.
Зачем роботам кожа?
Исследователи подчеркивают важность восприятия и ощущения роботом окружающей среды для успешного взаимодействия с ней. Формы объектов, которыми нужно будет манипулировать имеют решающее значение, на ряду с такими физическими свойствами как эластичность и гибкость. Восприятие формы определяет способность эффективно захватывать, удерживать и манипулировать предметами. Для этого и нужны универсальные системы сенсоров, которые могут принять любую форму, и быть установлены на подвижные части механизмов.

Одной из важнейших задач в области робототехники и протезирования является имитация сенсомоторных способностей человека, особенно его рук. Для достижения этой цели в большинстве робототехнических устройств используются датчики измеряющие силу сжатия, трения или крутящего момента. Однако любой традиционный датчики ограничен в своей форме, и не может быть распределен по поверхности. Разработка мягких датчиков, которые могут быть адаптированы под любую форму стала важным научным достижением. И хоть предложенное решение не столь совершенно как человеческая кожа, способная одновременно анализировать температуру, влажность, и текстуру, но оно открвает двери к базовым свойствам, необходимым роботу, который должен ощущать физический мир своими руками.
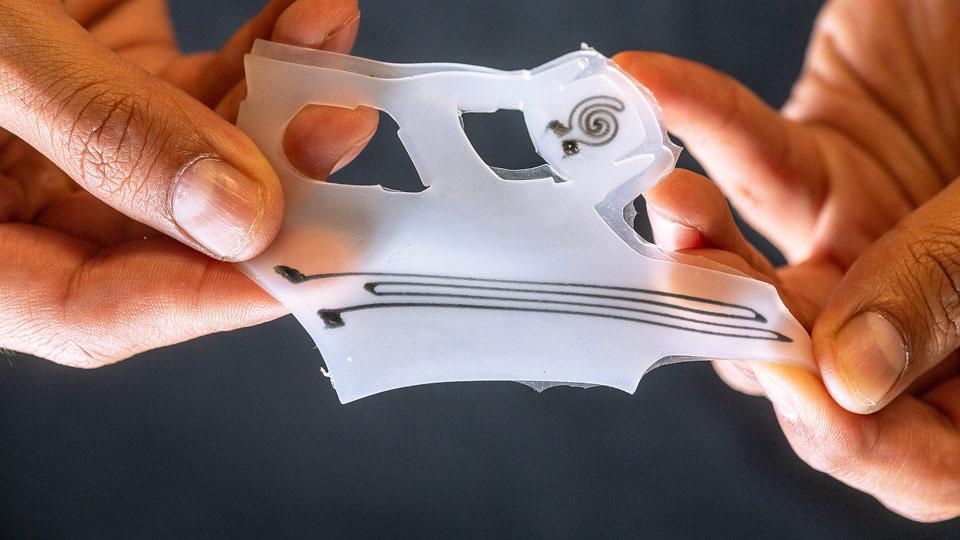
Технология была представлена учеными Соней Гросс и Диего Идальго на конференции ICRA Robotics в Лондоне. Ее особенностью является использование эластичного материала, который может обволакивать поверхность любого объекта. Принцип работы закладывается при разработке программной структуры сенсорной системы, которая в последующем передается на 3D-принтер. Датчики создаются путем введения специальной электропроводящей пасты в жидкий силикон. Когда оболочка из силикона затвердевает, паста внутри нее остается жидкой. Теперь при изменении формы датчика меняется его электрическое сопротивление, что позволяет определять уровень давления и деформацию поверхности. Эта инновация позволяет получать точные данные для взаимодействия искусственной руки с окружающей средой.

Результаты этого исследования оказались чрезвычайно перспективными для создателей роботизированных устройств. Профессор Сами Хаддин, исполнительный директор MIRM, подчеркивает, что интеграция мягких датчиков создает новые возможности даже в области искусственного интеллекта, который тепрь сможет анализировать тактильное восприятие. Сенсоры предоставляют ценные данные в режиме реального времени, значительно расширяя возможности взаимодействия с физическим миром. Этот новаторский подход предвещает новую эру, как минимум, в развитии робототехники и протезирования.
↩️ Последние новости и значимые события в мире робототехники







")



























 Что Это?")



