


























")











Агент для управления роботами под названием RoboCat способен саморазвиваться
Что бы создать робота общего назначения, необходимо наделить его способностью обучаться чему угодно. Google DeepMind опубликовала свежие данные о ходе работы по созданию и обучению своего агента RoboCat, созданного для управления роботами. Новая версия нейронной сети самостоятельно генерирует данные для собственного обучения, и результаты по истине впечатляющие. Теперь обо всем по порядку...

DeepMind, как и тысячи других исследователей из университетов и частных компаний пытаются создать программное обеспечение, которое позволило бы роботам самостоятельно обучатся чему либо. И не только у них есть успешные кейсы, по созданию нейронной сети для манипуляции роботом, тоесть агента. Агентами называют ИИ, задачей которых является управление каким либо роботом в реальном мире. Сходство с Агентом Смиттом, программой способной вселяться в любого обитателя Матрицы, и брать на себя управление его телом - просто совпадение.
В виртуальном пространстве, через него можно прогнать нереальное количество данных, в очень сжатые сроки, были бы вычислительные мощности. Но проблема с обучением искусственного интеллекта такого типа заключается в том, что если он берется управлять физическими обьектами в реальном мире, к примеру выполнять какие либо задачи с помощью роботизированной руки, то ему нужно колоссальное количество попыток для совершенствования. Мало того, процесс обучения сложно реализовать без присутствия человека.
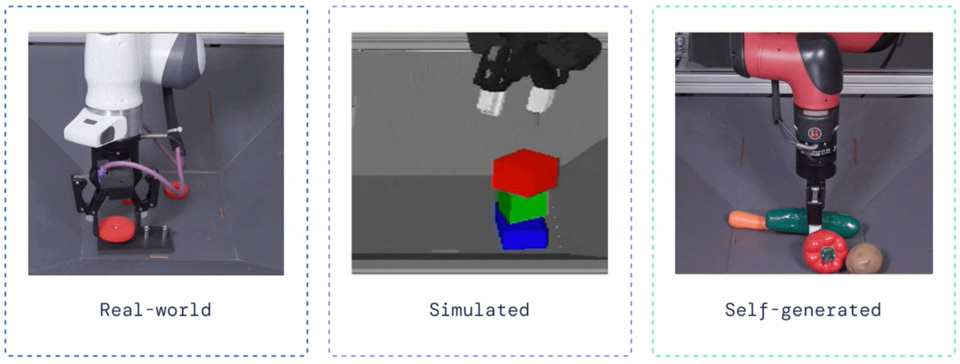
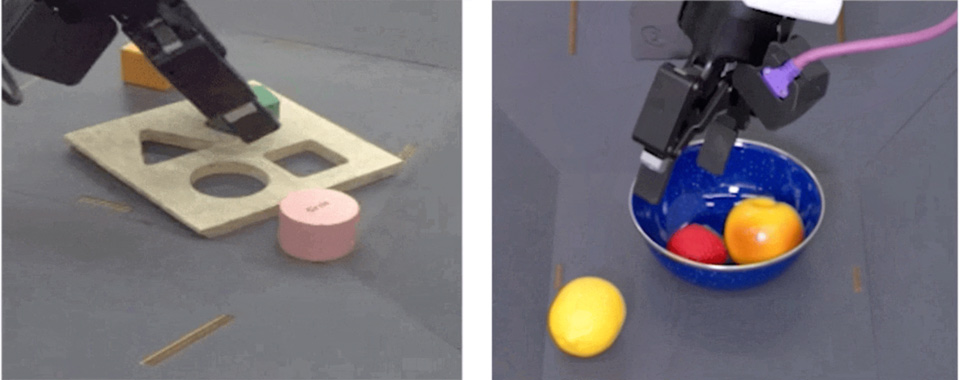
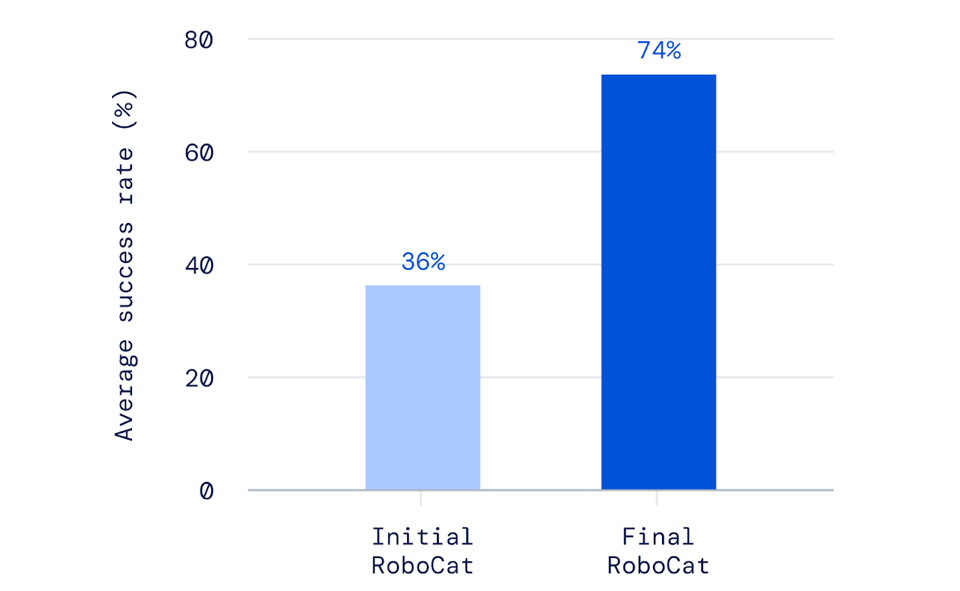
Агент от DeepMind выгодно отличается тем, что базируется на мультимодальной модели Gato (Кошка на испанском). Эта модель может обрабатывать язык, изображения и главное действия, причем как в симулированном, так и в физическом пространстве. Это позволяет еще на старте обучать его, с помощью около 100 демонстраций различных движений, и только после этого приступать к попытком манипуляции робо-конечностью. Предидущая версия RoboCat работала именно так, и стартовых данных хватало для того что бы обеспечить 36% успешных выполнений задачи.
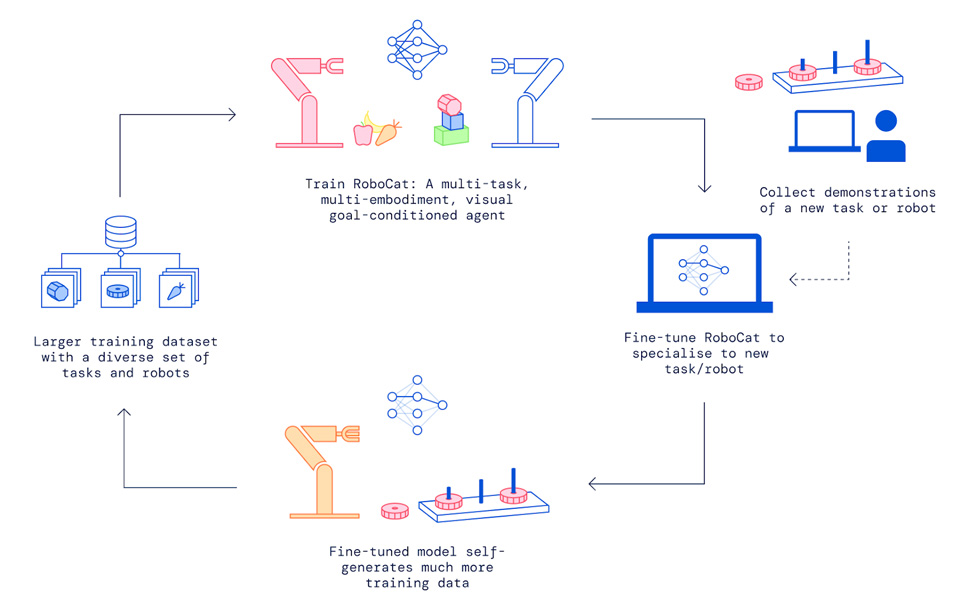
Но разработчики пошли дальше, и снабдили своего агента функцией генерации данных для собственного обучения, и это перевернуло все. Теперь ИИ способен генирировать различные события в симуляции, взяв за основу как пройденный материал, так собственные попытки выполнить задачу в реальности, и обучаться в виртуальном пространстве. Затем повторять попытки, и обзавевшись новыми данными снова проходить обучение в симуляции.
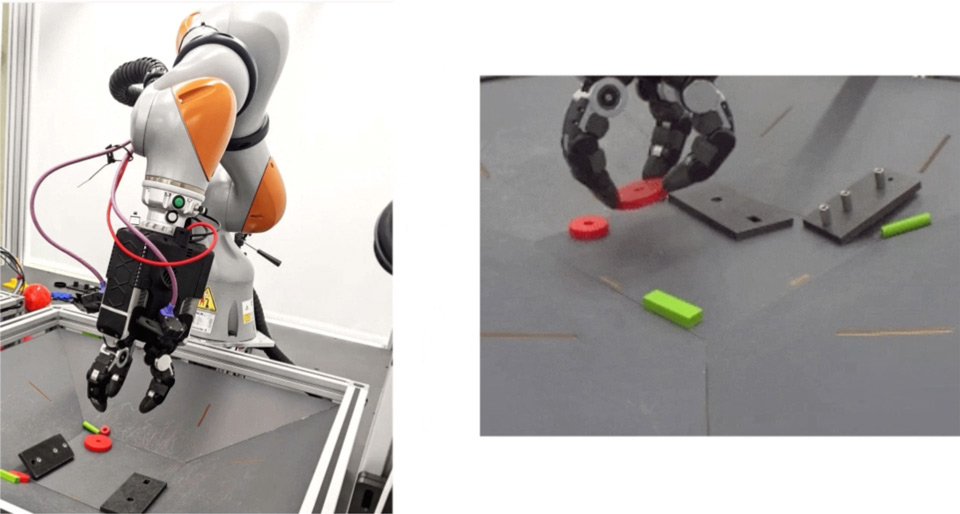
Новая версия RoboCat вдвое успешней выполнняет задачи, даже если развернут для управления новым агрегатом. К примеру выполняет их с помощью трехпалого манипулятора, а обучение проходил на двупалом. Агент успешно адаптируется не только к новым задачам, но также адаптирует себя под разные манипуляторы, и может похвастаться успехом в 74%, даже если находится за данным штурвалом впервые. Причем процесс адаптации к "новому телу" занимает всего пару часов, хотя входящих сигналов от более сложной руки в два раза больше.
Чем больше данных получает агент тем более успешно он начинает выполнять поставленные задачи, и тем лучше адаптироваться к управлению более сложным механическим телом. А значит если разработки пойдут в том же темпе, то скоро стоит ждать универсальное ПО, способное управлять даже человекоподобным роботом.
↩️ Последние новости и значимые события в мире робототехники







")



























 Что Это?")



