


























")











Собираем простого робота, который движется как рак - Lobsterbot
Содержание:
Введение:
Представляем интересный механизм – робот Lobsterbot. Особенность данного устройства заключается в его простоте. Всё, что нужно для управления – это чип и реле. Корпус содержит шесть ног, которые могут быть сделаны самостоятельно с дерева или с готовых элементов любого конструктора для роботов. По принципу движения робот напоминает рака – отсюда и название: Lobsterbot.
Построив этого робота самостоятельно, вы сможете убедиться, что шестиногие роботы – вещь не только интересная и забавная, но и весьма полезная, так как с помощью этого робота можно познать азы построения умных роботов, которые пригодятся для дальнейших исследований в области робототехники.
За основу вы можете использовать готовый каркас робота-шестинога Boe-Bot от Herbie.
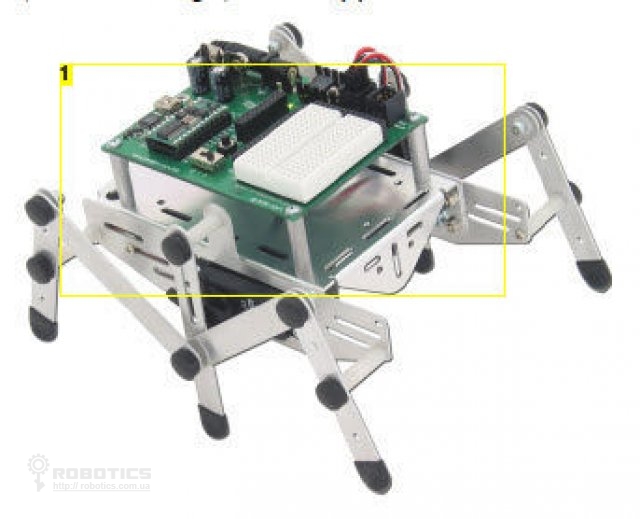
1 - шестиногий набор для робота Boe-Bot.
Шаг 1. Каркас робота:
Сначала поработайте над макетом ног робота. Тело и ноги можно смастерить из кусков картона и прикрепить их вместе медными гвоздями.
Когда закончите с макетом, вырежьте алюминиевые боковые панели из 5052 алюминия толщиной 1/8 дюйма.
Затем можете сделать плоские отрезки латуни для того, чтобы сделать суставы для ног робота.
С помощью 6 болтов размером 1/2 дюйма сделайте длинные опорные точки для ног. Глядя на вид сверху, вы можете видеть, что можно использовать болты и другой длины.
Также добавьте латунные полоски над болтами для удержания тела и суставов ног. Когда ноги будут выровнены, используйте держатель для того, чтобы болты и гайки не выпали при ходьбе.
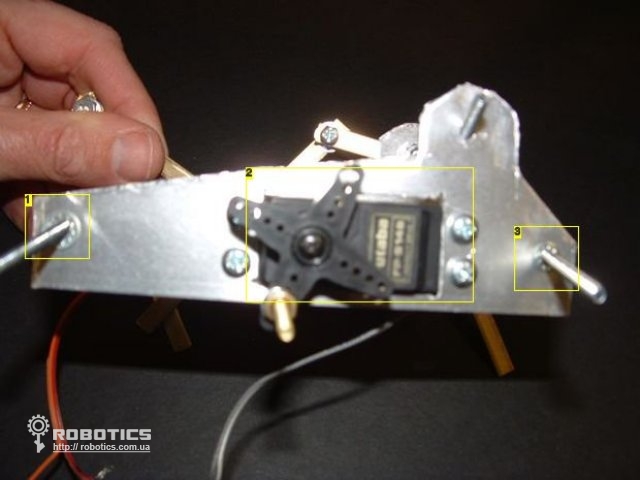
1 – зажимная шайба вместе с фиксатором; 2 - стандартный сервопривод Futaba, модифицированный для непрерывного вращения; 3 – болт.

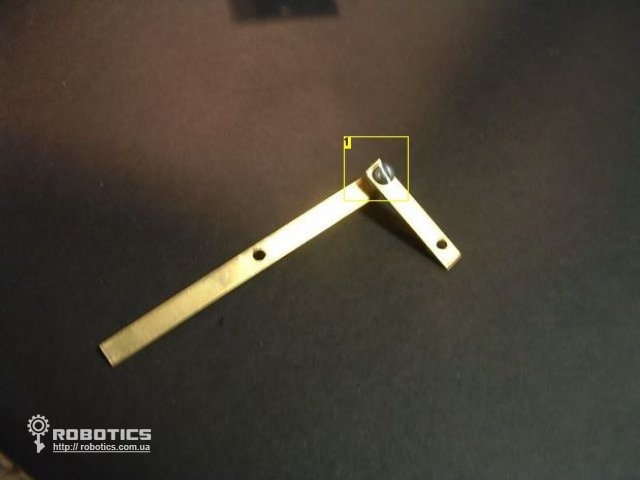
1 - плоский кусок латуни для ног робота с шестью болтами, гайками и шайбами различной длины.

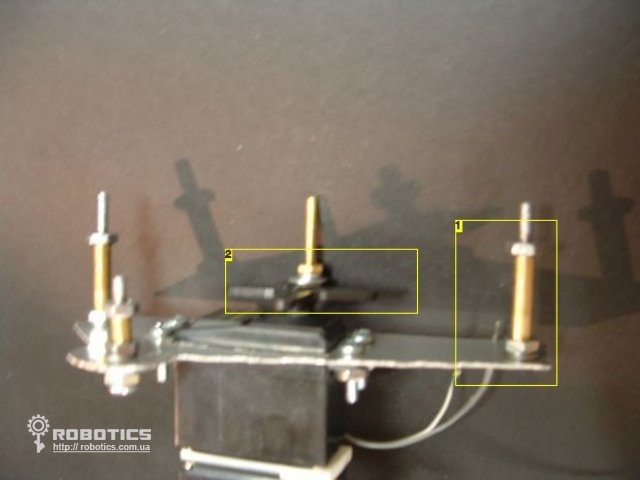
1 – латунная трубка для удерживания ног и тела робота; 2 – сервопривод, прикрепленный болтами.
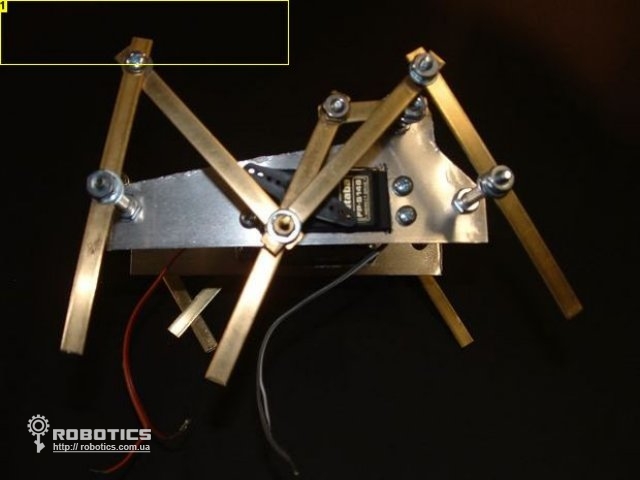
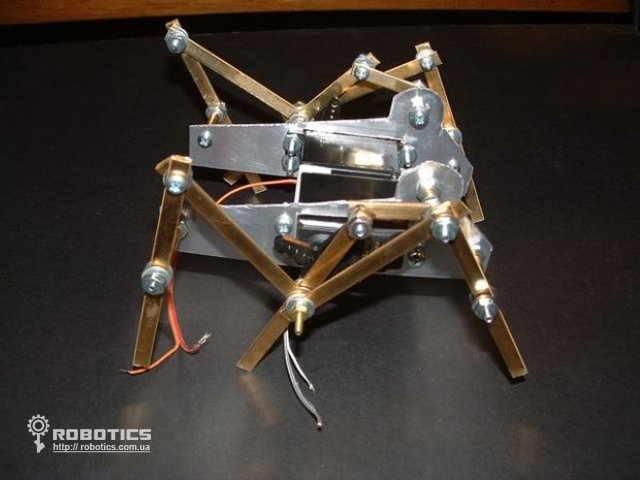
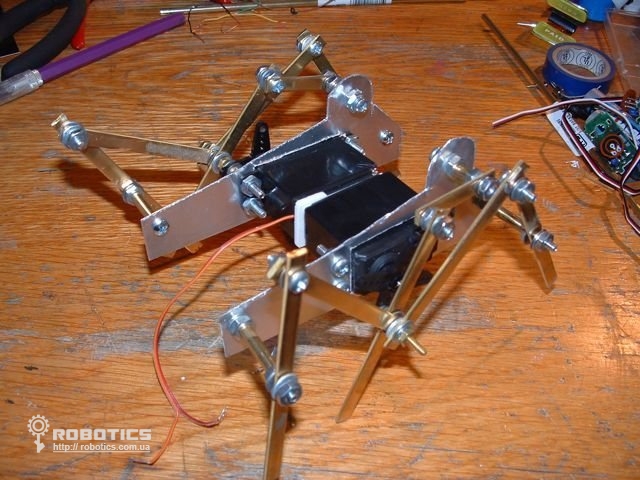
1 – вид сбоку.

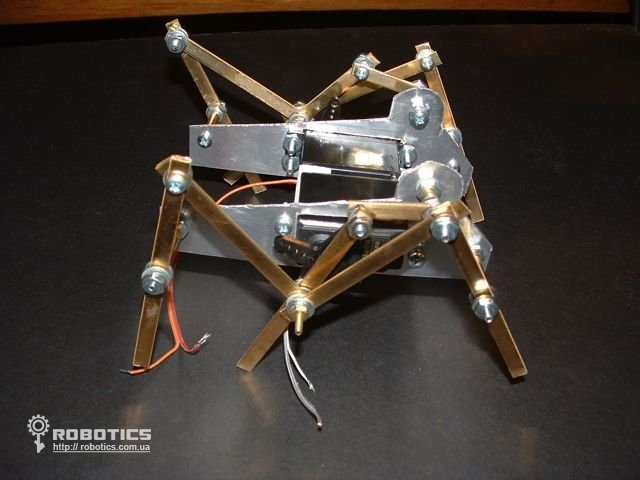
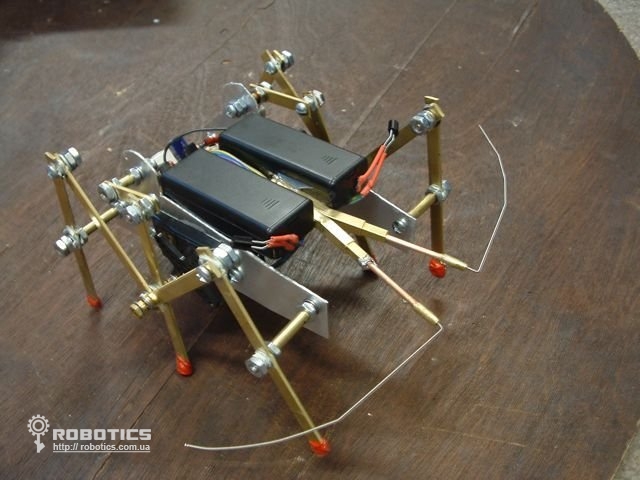
1 – вид сверху: ноги расположены в шахматном порядке, чтобы избежать столкновения друг с другом.
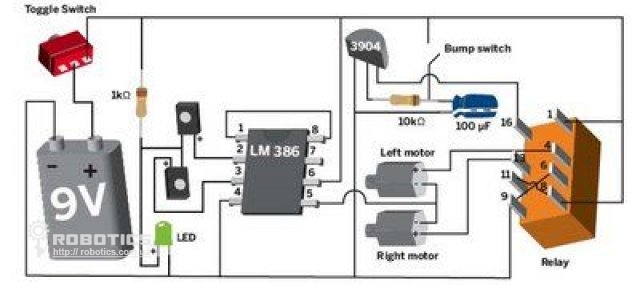
Шаг 2. Список материалов и схема:
Список деталей:
- 1x 2222A транзистор (подобен типу 3904)
- 1x LM 386 усилитель низкой мощности (чип Вт / 8 проводов)
- 1x DPDT реле (10 проводов)
- 2x двигателя
- 1x 1k резистор (коричневый с черно-красными полосками)
- 1x резистор 10 кОм (коричневый с черно-оранжевыми полосками)
- 1x 100uF конденсатор
- 1x красный светодиод
- 1x переключатель
- 2 х пластиковые коробки аккумулятора, каждая из которых содержит 2 батареи типа АА
- 1 х двусторонняя липкая пена
- 2 x фотодиоды - Jameco и др.
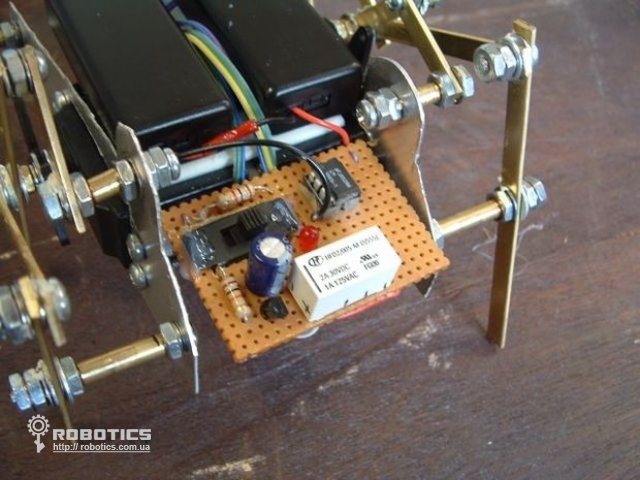
Припаяйте вашу схему к макетной доске так, чтобы было место для установки шасси и сервоприводов.
Сервоприводы должны быть прикреплены к шасси с 3/8 " болтами и гайками. Затем прикрепите два сервопривода небольшим отрезком двусторонней ленты-пены, которая на удивление очень крепко клеит предметы.
Снимите "мозг" из каждого сервопривода и просто припаяйте два провода непосредственно к двигателю. Таким образом, вам не нужны сигналы из широтно-импульсного модулятора для запуска сервоприводов, они просто функционируют.

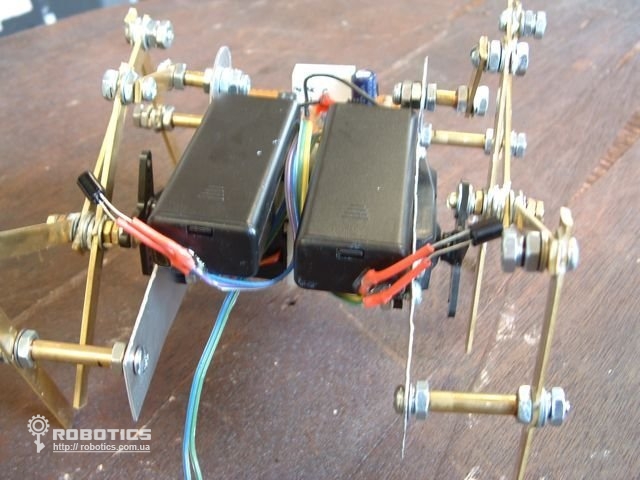
1 - LM386; 2 – двухпозиционное реле.
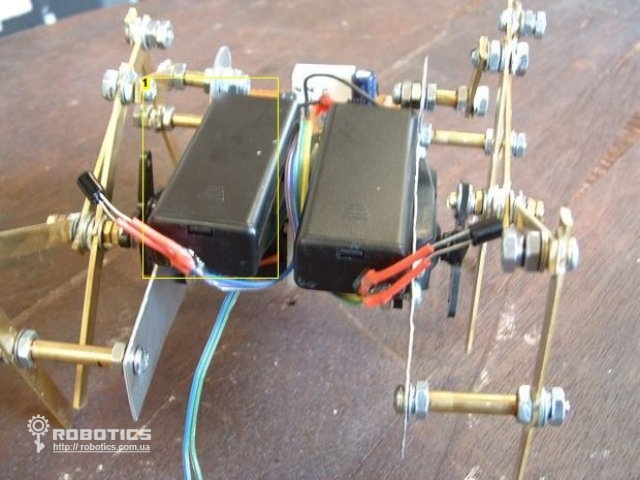
1 – держатель для 2-ух батареек типа АА, приклеенный к сервоприводу.

1 – болты, которые держат сервоприводы на месте.
Шаг 3. Lobsterbot оживает!:
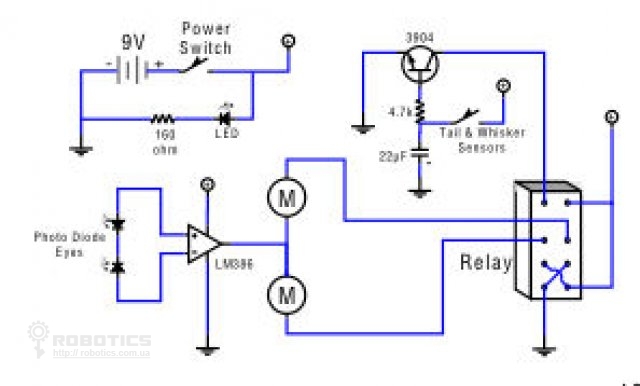
Вы можете использовать рычаг переключения устройства, чтобы определить, связаны ли серводвигатели с остальными механизмами. Схема затем переводит двигатель в обратном направлении и производит резервное копирование.
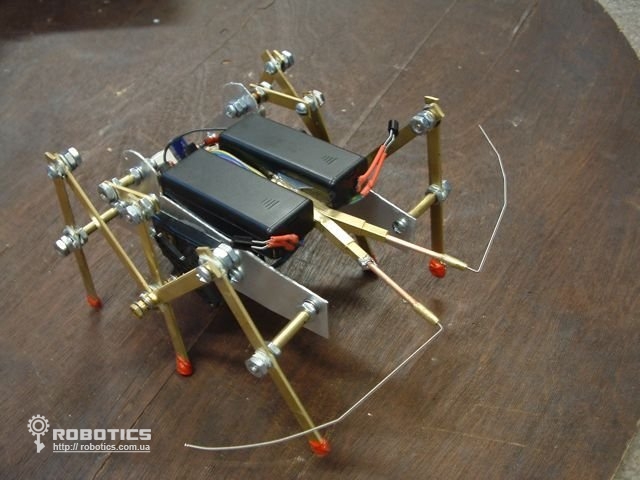
Lobsterbot использует также усики с датчиками. В основном, они служат просто выключателем. Когда усы (из гитарной струны) вступают в контакт, они наклоняются и касаются латунной трубки. Один провод датчика придает усикам поддержку, а другой провод датчика направлен к гитарной струне. В конце гитарная струна имеет термоусадочную трубку вокруг него так, что основание не контактирует с трубкой.
Если перед роботом существует мертвая зона, он может застрять в некоторых вещах.
Опустите концы латунных ног в Plastigoop – материал, куда вы можете окунуть ручки для инструментов для обеспечения лучшего сцепления на поверхности.
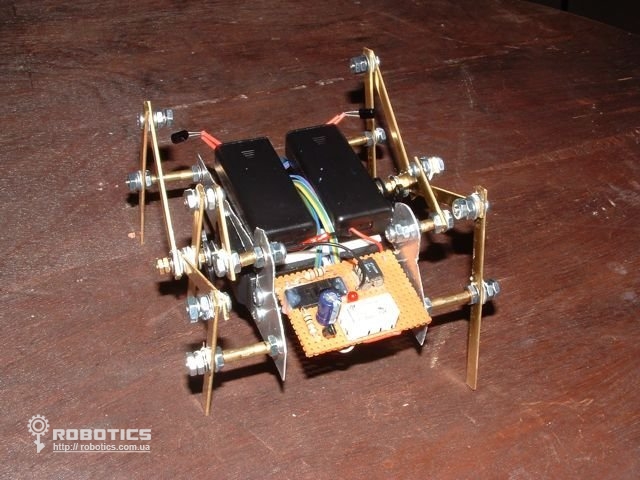
Как видите, робота Lobsterbot очень интересно строить, и вам очень понравятся его движения, когда питание подается с двумя сервоприводами. Им весело управлять в темной комнате с помощью фонарика.
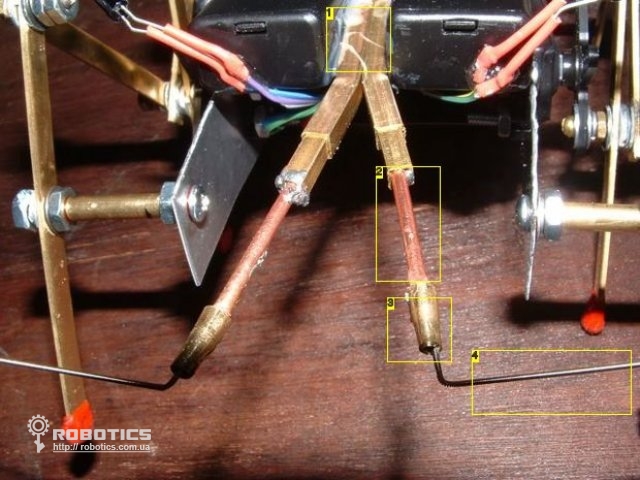
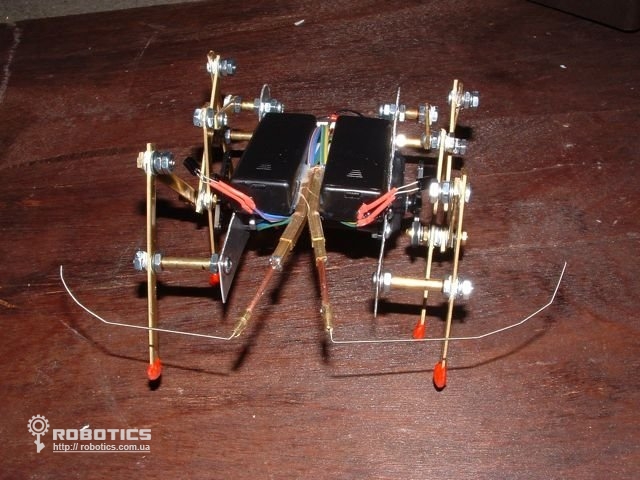
1 – квадратная латунная трубка, 2 - круглая медная трубка для прикольного вида, 3 – круглая латунная трубка, 4 – струна от электрогитары.
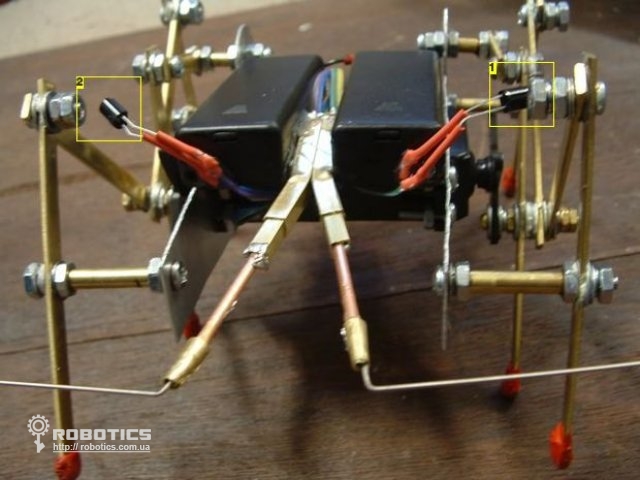
1 – фотодиод; 2 – фотодиод.



")

")
")
")
")
")
")
")
")
")
")

")
")