


























")











Создаём робота из старой телефонной трубки
Содержание:
- Введение
- Видепрезентация работы
- Шаг 1. Необходимые компоненты для робота
- Шаг 2. Откройте трубку
- Шаг 3. Просверлите отверстия
- Шаг 4. Первый двигатель
- Шаг 5. Второй двигатель
- Шаг 6. Выключатель
- Шаг 7. Шаблон для дисков
- Шаг 8. Порежьте CD-диски
- Шаг 9. Держатель для батарей
- Шаг 10. Соедините проводки
- Шаг 11. Присоедините диски
- Шаг 12. Прикрепите болты
- Шаг 13. Наденьте колпачки на болты
- Шаг 14. Обеспечьте робота энергией
Введение:
Этот интересный робот называется очень просто – Walker, то есть шагающий механизм. Он может быть построен в общей сложности за 4 часа, но при второй попытке время на создание робота может занять всего 10 минут. На самом деле, он очень простой и не требует каких-либо дорогих материалов и программирования.


Шаг 1. Необходимые компоненты для робота:

- x2 серводвигатели для приведения робота в движение
- х1 телефонная трубка
- x1 держатель для четырех батарей АА
- x1 DPDT выключатель
- x2 CD диски
- x2 шести дюймовые болты
- x2 пяти дюймовые болты
- x4 колпачки для болтов
- x2 тонкие одно дюймовые гайки и болты
- x1 несколько стяжек
- x1 шаблон для вырезания
Шаг 2. Откройте трубку:
Откройте крышки из телефонной трубки и вытащите от туда динамик, микрофон и гнездо с проводами.



Шаг 3. Просверлите отверстия:
Просверлите четыре отверстия в каждом конце телефонной трубки, как показано на картинке. В общем, нужно просверлить отверстия по форме квадрата, чтобы к ним удобно было прикрепить двигатели.



Шаг 4. Первый двигатель:
Начиная от стороны телефонной трубки, где находилось соединительное гнездо, проведите провода с двигателя сквозь инструмент внутрь. Вставьте первый двигатель в телефонную трубку, открывая её на противоположной стороне от соединительного гнезда таким образом, чтобы рожок двигателя уходил вовнутрь.
примечание: рожок – это объект по типу зубчатой передачи, прикрепленный к корпусу двигателя.


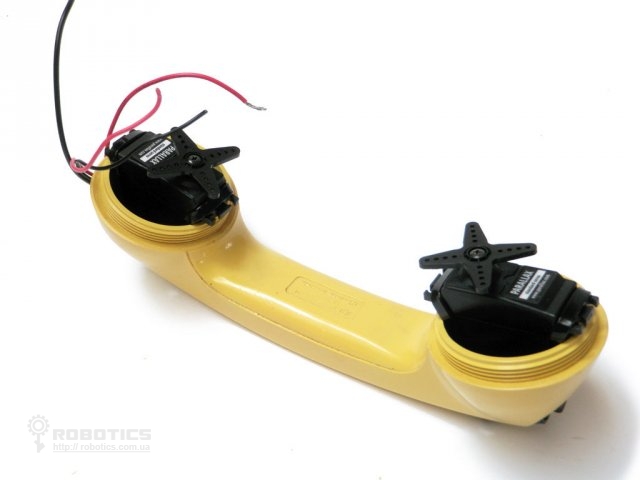
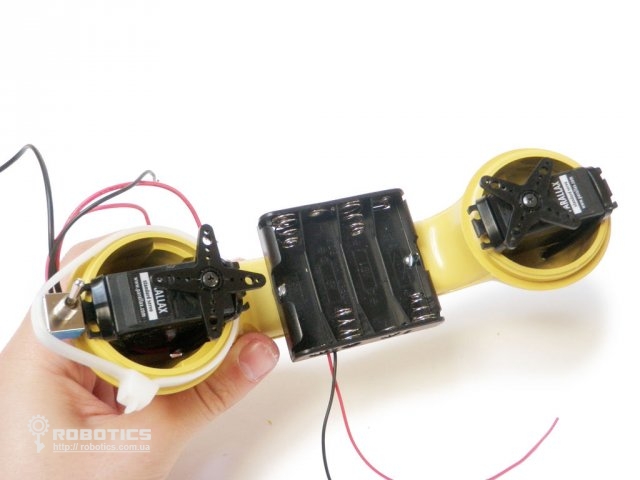
Шаг 5. Второй двигатель:
Протяните провода от второго двигателя через отверстие, которое осталось от соединительного гнезда и вставьте двигатель в этот конец трубки. Убедитесь, что рожок этого двигателя также уходит вовнутрь. Закрепите оба двигателя через отверстия, которые вы сделали в Шаге 3 с помощью стяжек.





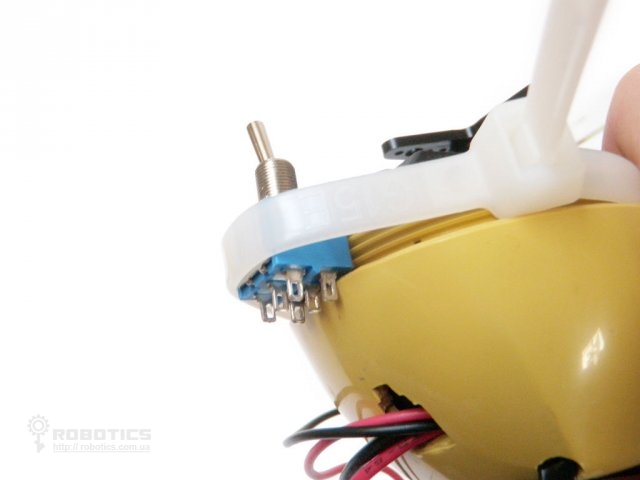
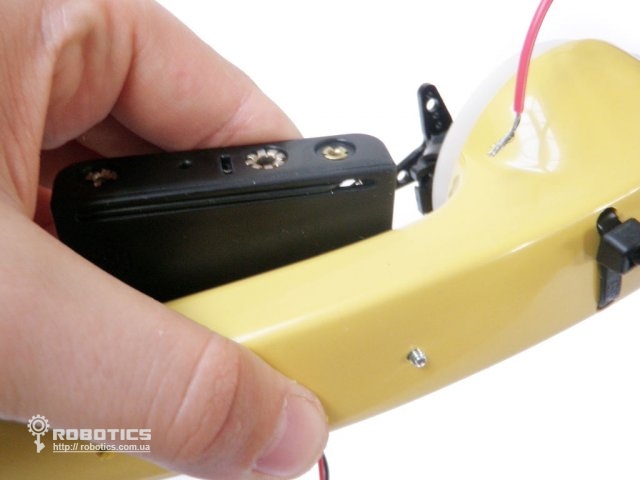
Шаг 6. Выключатель:
Прикрепите стяжками DPDT выключатель к круглому отверстию трубки прямо над отверстием, которое получилось после изъятия гнезда. Возможно, понадобится небольшой выступ для того, чтобы надежно установить выключатель. Убедитесь, что рычаг переключателя указывает наверх (прямо к рожку двигателя).

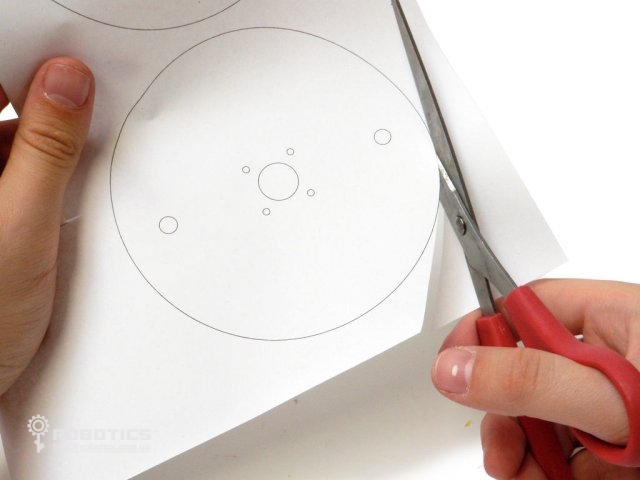
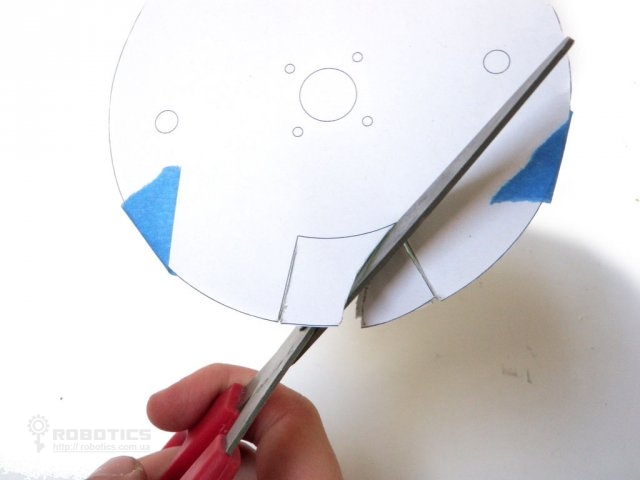
Шаг 7. Шаблон для дисков:
Вырежьте по окружности два больших круга.
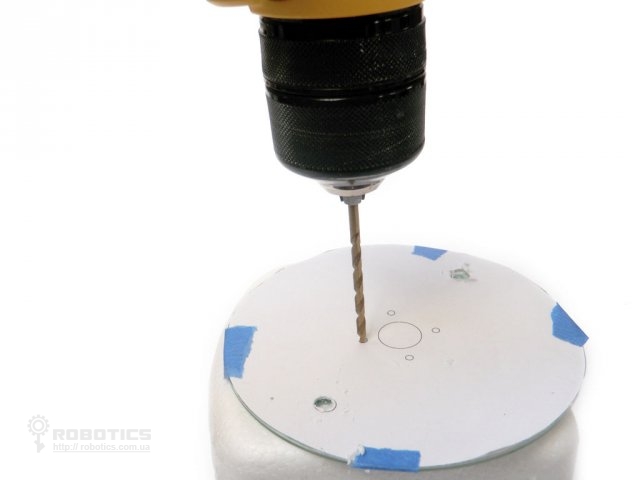
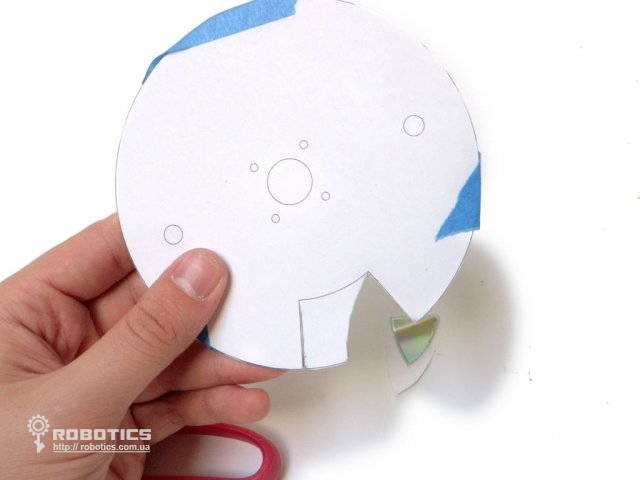
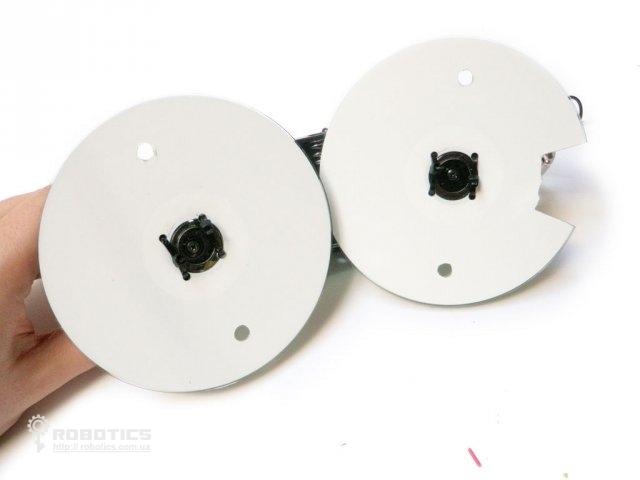
Шаг 8. Порежьте CD-диски:
Приклейте шаблоны к центру каждого диска.
Для двух больших внешних отверстий просверлите 1/4 "отверстия (или такие, что бы подходили для ваших болтов).
Для четырех меньших внутренних отверстий просверлите 1/8 "отверстия (или такие, что бы подходили под ваши стяжки).
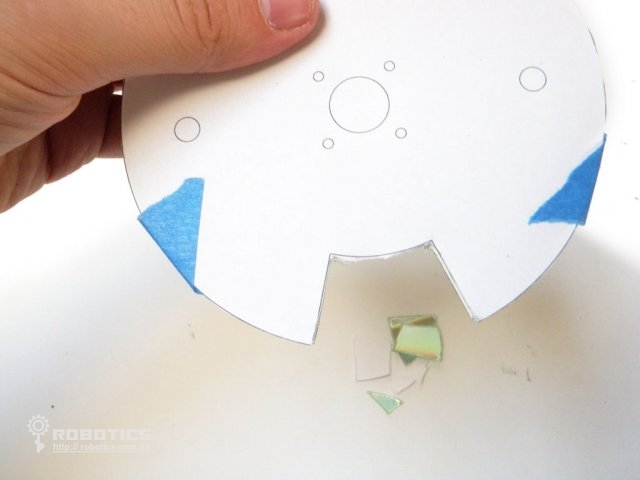
На одном компакт-диске сделайте выемку, как показано на рисунке, вырезав её с помощью обычных ножниц.





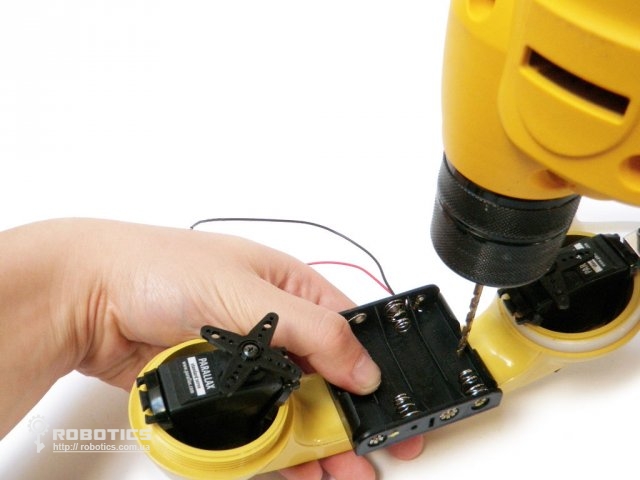
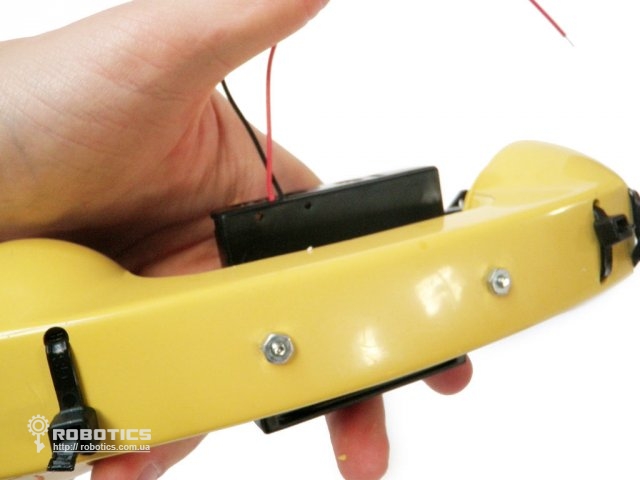
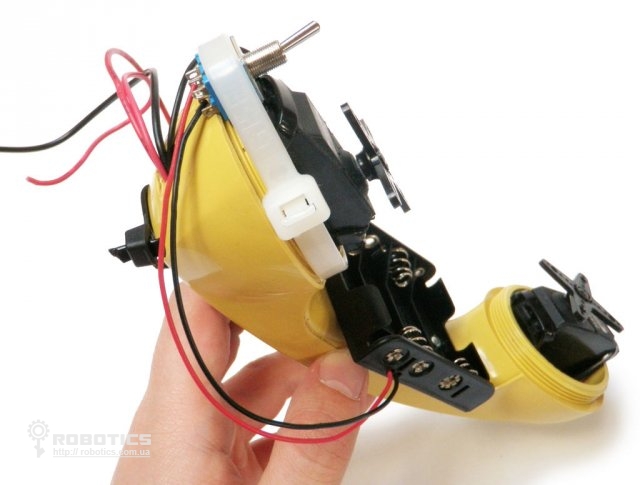
Шаг 9. Держатель для батарей:
Просверлите два отверстия по 1/8" в центре телефонной трубки, так чтобы они были на одной линии с отверстиями на держателе батарей.
Прикрепите держатель батарей к телефонной трубке с помощью пары одно дюймовых болтов и гаек.


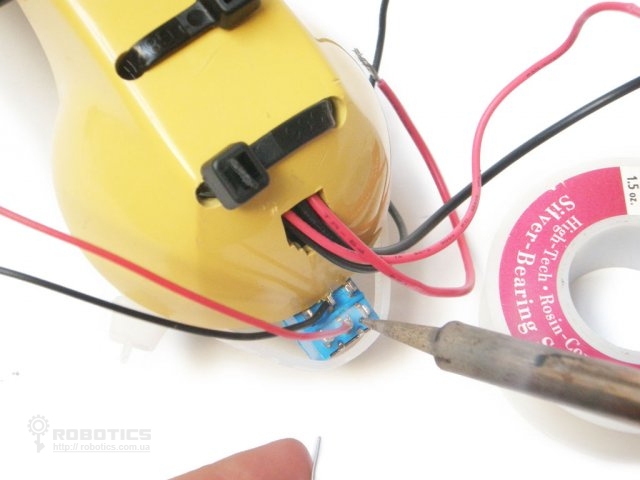
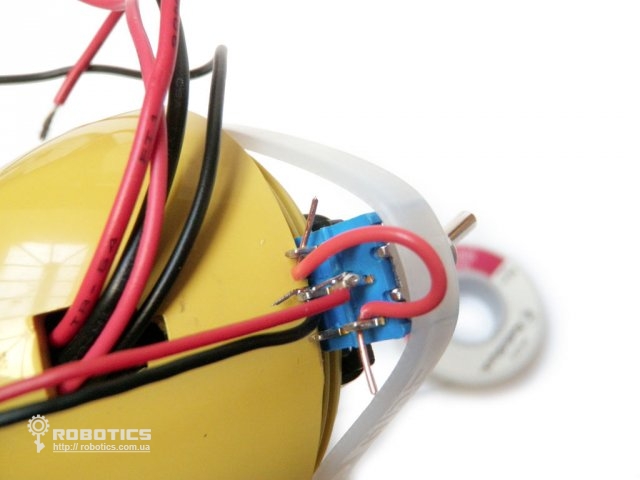
Шаг 10. Соедините проводки:
Припаяйте красный и черный провода от батареедержателя к каждому концу DPDT выключателя.
Припаяйте два коротких проводка так, чтобы они образовали букву Х между внешними концами выключателя. Задний левый провод должен быть подсоединен к переднему правому, а передний левый - к заднему правому. Это производит энергию в обратном направлении, когда переключатель щелкает.
Припаяйте красный провод от первого двигателя к черному проводу от второго двигателя, а черный провод с первого двигателя подсоедините к красному со второго двигателя (один из двигателей имеет меньшее значение).
Наконец, припаяйте красный и черный провода к внешним концам двигателей. Например, припаяйте одну пару к заднему левому концу, а другую пару к заднему правому концу.
Если для вас всё это кажется запутанным, посмотрите на диаграмму на рисунке.

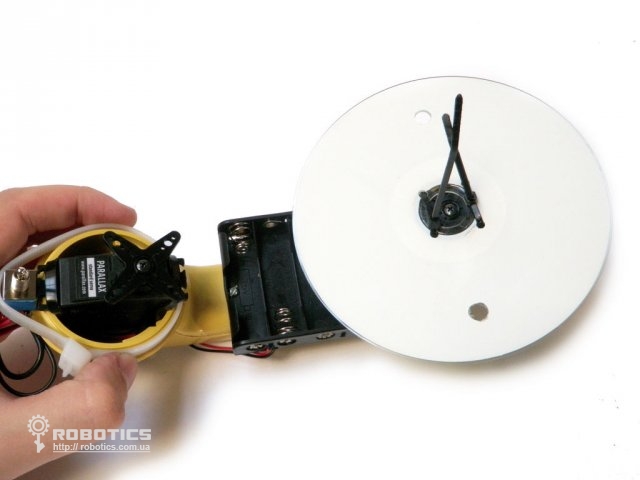
Шаг 11. Присоедините диски:
При необходимости сделайте или расширьте отверстия в рожке от серводвигателя, просверлив их размером 1/8" в соответствии с шириной стяжек.
Прикрепите стяжками диски к двигателям так, чтобы двигатель был по центру точки вращения, а два внешних отверстия были перпендикулярно к телефонной трубке. Не забывайте, что внешняя выемка была прорезана, чтобы позволить рычагу выключателя свободно двигаться.



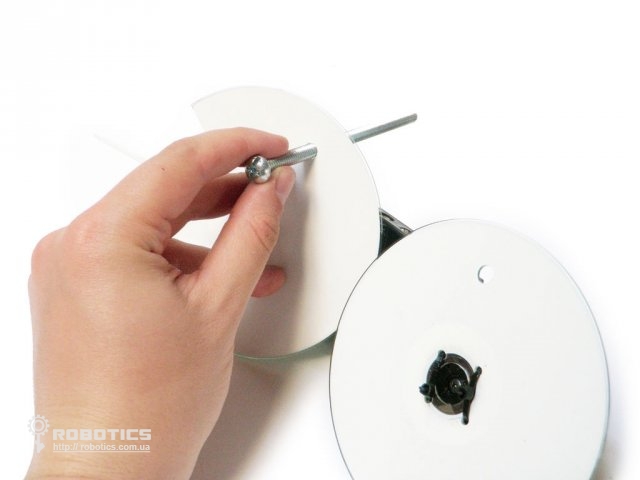
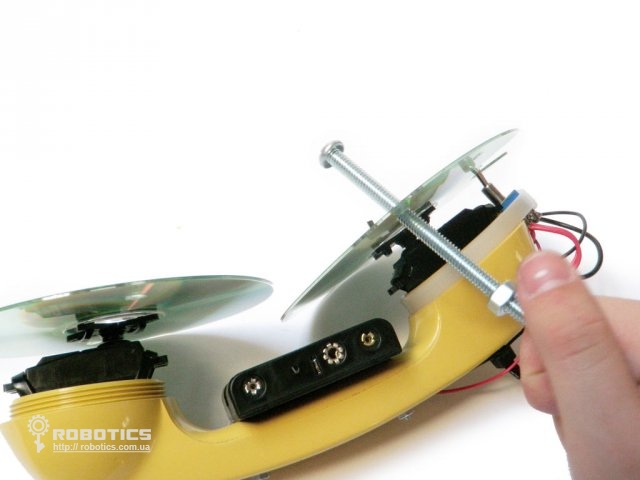
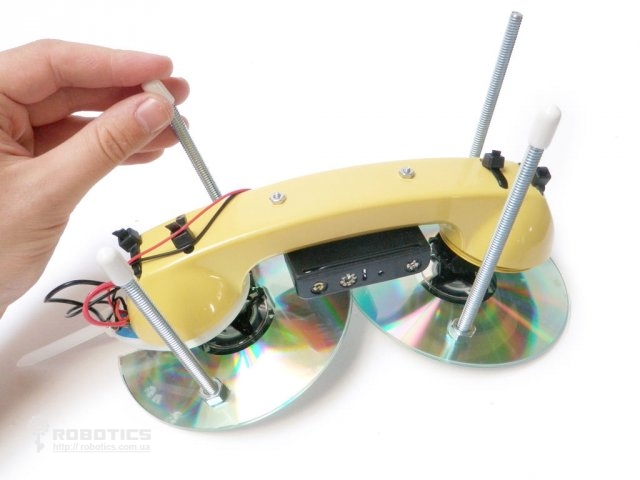
Шаг 12. Прикрепите болты:
Проведите короткие болты через надрезанный диск прямо к корпусу трубки. Длинные болты протяните к другому диску. Закрепите все их на месте гайками.


Шаг 13. Наденьте колпачки на болты:
Наденьте на болты резиновые колпачки, которые позволят им двигаться более мягко.
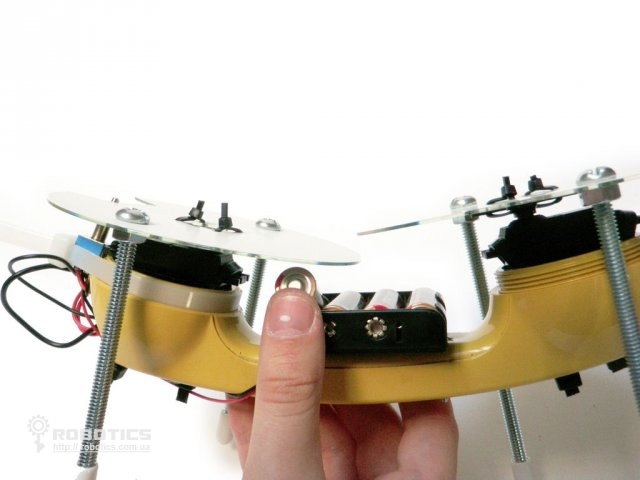
Шаг 14. Обеспечьте робота энергией:
Вставьте батарейки в держатель, который находится прямо по центру трубки. Всё готово! Теперь вы можете наслаждаться своим забавным роботом Walker в полной мере.


")

")
")
")
")
")
")
")
")
")
")

")
")