


























")











Робот из мягкого материала своими руками
Содержание:
- Введение
- Необходимые материалы
- Шаг 1. Шаблон для 3D-печати
- Шаг 2. Подготовка силиконовых резиновых смесей
- Шаг 3. Налейте микстуру в форму
- Шаг 4. Налейте микстуру на поднос
- Шаг 5. Смесь должна застыть
- Шаг 6. Проверьте, застыла ли резина
- Шаг 7. Достаньте резину из формы
- Шаг 8. Смешайте свежую порцию силиконовой резины
- Шаг 9. Разложите тонкий слой новой силиконовой резины поверх первого слоя
- Шаг 10. Разместите верхнюю часть робота лицом вниз на новый слой силиконовой резины
- Шаг 11. Распространите резину по внешнему периметру робота
- Шаг 12. Дайте слою клея остыть
- Шаг 13. Снимите слой с подноса
- Шаг 14. Разрежьте робота ножницами
- Шаг 15. Проколите робота воздушной трубкой
- Шаг 16. Подключите грушу
- Шаг 17. Наполните воздухом
- Шаг 18. Устранение неполадок
Введение:
Мягкотелые роботы являются последним писком моды в робототехнике различных научных сообществ. Забудьте все, что Вы обычно слышали про роботов и машины - шестерни, шкивы, печатные платы, алюминий и сталь. Эти роботы сделаны из мягкого материала, растягивающегося каучука и пластмассы, а управляются с помощью сжатого воздуха в результате химической реакции, и материалов, которые изменяют форму за счет электрического тока или напряжения.
В этом проекте мы опишем, как сделать простого, пневматического мягкого робота, который сделан из силиконовой резины, и формы с использованием 3D печатных деталей. Проект основан на мягких захватах и шагающем механизме, изначально разработанном группой Уайтсайдс в Гарвардском университете. В рамках проекта требуется доступ к 3D-принтеру, или вы можете заказать 3D печатные формы из таких источников онлайн печати, как Shapeways, Sculpteo или iMaterialise.


Необходимые материалы:
- Ecoflex 00-30 (одного пробного комплекта достаточно, чтобы сделать 5-10 роботов в зависимости от их размера)
- 1/16 "ID, 1/8" OD полиэтиленовые трубки (номер 5181K15 на McMaster-Carr), примерно один фут
- 1/8 "ID, 1/4" OD силиконовой резиновой трубки (номер 5236K832 на McMaster-Carr), примерно один дюйм
- груша: мы рекомендуем "Polaroid Super Blower с высокопроизводительной силиконовой кремниевой грушей". Доступна на Amazon.com и ritzcamera.com.
- 3D-печатные формы (STL файл доступен в качестве приложения к этой странице)
- пластиковый поднос или металлический лоток для выпечки
- одноразовые резиновые перчатки
- ножницы
- пластиковые колбы (стаканы)
- кофе-мешалка или палочка эскимо
- бумажные полотенца для очистки
- (дополнительно) духовка. Не пользуйтесь устройством, которое Вы также используете для приготовления еды.
Шаг 1. Шаблон для 3D-печати:
Если Вы являетесь владельцем, или имеете доступ к 3D-принтеру, распечатайте свои собственные формы. Есть много недорогих "рабочих" 3D-принтеров, доступных на рынке, таких как Makerbot, Cube, и UP. Если у вас нет доступа к 3D-принтеру, Вы можете заказать форму от интернет-поставщика, как Shapeways, Sculpteo или iMaterialise.
Не забудьте выбрать материал с гладкой отделкой поверхности. Иначе будет трудно (или невозможно) удалить силиконовую резину из Вашей формы. Опытным пользователям: если у Вас есть доступ к программному обеспечению CAD, Вы безусловно можете создавать свои собственные формы, вместо использования файла для загрузки. В статье «Мягкая робототехника для химиков» дополнительный материал обеспечивает отличное введение в различные типы и формы, пресс-формы и в результате движения робота.

Шаг 2. Подготовка силиконовых резиновых смесей:
По технике безопасности: Ecoflex – это вид силиконовой резины для литья, сделан Smooth-On Inc. Ecoflex поставляется в двух бутылках, содержащих части А и В. Части А и В являются жидкостями - при смешивании вместе, они укрепляют и образуют силиконовую резину (в течение 4 часов при комнатной температуре или 10 минут при 150 ° F). Материалы не токсичны и очень просты. Тем не менее, в соответствии с данными по безопасности материалов (MSDS), "повторное или длительное" воздействие не смешанных материалов может вызвать легкое раздражение кожи. Мы рекомендуем использовать одноразовые перчатки при работе с не смешанным материалом. Если часть А или B попадет на Вашу кожу, просто смойте её водой с мылом. Смешайте части А и В Ecoflex в соотношении 50/50, используя бумажные или пластиковые колбочки. Вы не должны использовать весь Ecoflex - заполните одну чашку и накройте крышкой обратно банки Ecoflex, и сохраните остальную часть материала, чтобы сделать ещё роботов. Смесь перемешайте в течение около двух минут.

Шаг 3. Налейте микстуру в форму:
Медленно влейте смешанный Ecoflex в вашу 3D-печатную форму. Материал очень вязкий, поэтому он будет течь медленнее. Не лейте слишком быстро! Заполните форму до верхнего края. После заполнения подождите около пяти минут, чтобы на смеси появились пузыри. Вы можете помешать пузырьки воздуха кофе мешалкой, карандашом или ручкой, чтобы ускорить процесс.

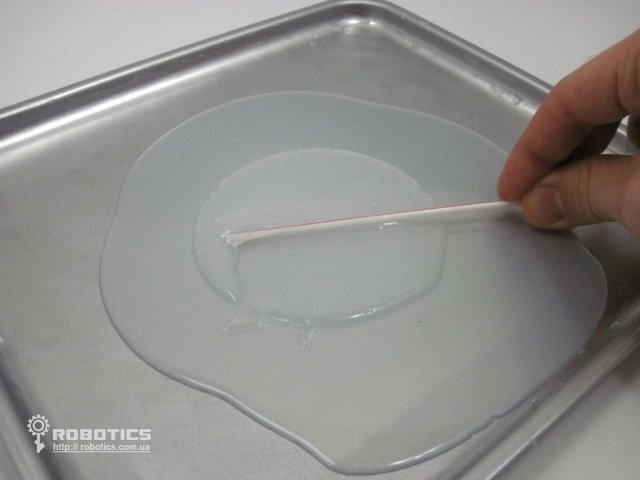
Шаг 4. Налейте микстуру на поднос:
Налейте оставшийся Ecoflex на поднос. Убедитесь, что он образовал достаточно большую лужу, чтобы полностью окружить внешний периметр пластиковой формы. Если Вы собираетесь сделать несколько роботов, Вы можете заполнить весь поднос. Слой должен быть толщиной в несколько миллиметров.

Шаг 5. Смесь должна застыть:
Теперь Вы должны необработанный Ecoflex вылить на Ваш пластиковый поднос. Пусть материал постоит в течение 4 часов, и он будет крепким при комнатной температуре. Дополнительно: если у Вас есть доступная духовка и Вы используйте металлический поднос, Вы можете приготовить материал в течение 10 минут при температуре 150 градусов по Фаренгейту.

Указания по технике безопасности:
- не используйте духовку, которая также используется в приготовлении пищи
- не ставьте пластиковый лоток в духовку
- тщательно проверьте температуру плавления материала Ваших 3D-печатных форм. Пластик ABS не будет плавиться при 150 ° F, но Ваш материал может быть различным.
Шаг 6. Проверьте, застыла ли резина:
Спустя 4 часа при комнатной температуре (или 10 минут в духовке при температуре 150 градусов по Фаренгейту), Ваш Ecoflex должен быть твердым. Попробуйте материал на ощупь. Он должен иметь резиновую форму, но не должен быть клейким. Он также должен стать немного непрозрачным. Если материал еще липкий и прилипает к пальцам, то нужно больше времени для застывания. Внимание: если Вы использовали духовку, ваш металлический поднос с материалом будет горячим. Используйте перчатки, чтобы достать их из духовки и дайте им остыть прежде, чем Вы будете обращаться непосредственно с ними.
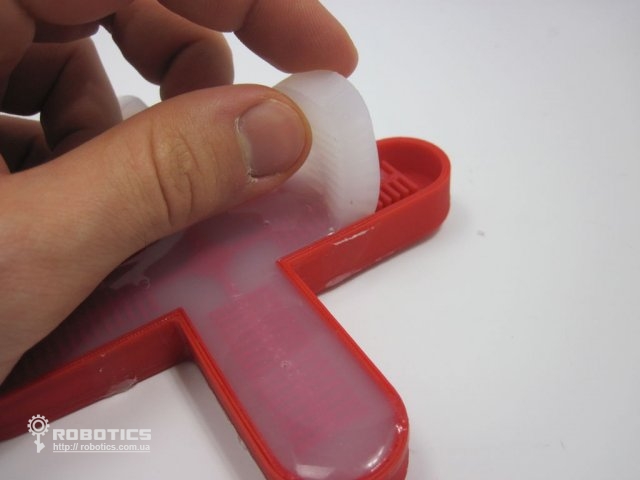
Шаг 7. Достаньте резину из формы:
Аккуратно достаньте силиконовую резину из формы, начиная с внешнего края. Будьте осторожны и делайте это медленно. Если Вы это сделаете слишком быстро, материал может порваться.


Шаг 8. Смешайте свежую порцию силиконовой резины:
Используя новую чашку, смешайте свежую порцию Ecoflex в соотношении 50/50 компонентов А и B. Вам нужно всего лишь небольшое количество в этом шагу - достаточно, чтобы нанести тонкий слой, даже с покрытием толщиной 1 мм на плоском листе на противень для выпечки.
Шаг 9. Разложите тонкий слой новой силиконовой резины поверх первого слоя:
Нанесите тонким ровным слоем (около 1 мм толщиной) свеже-смешанную силиконовую резину на верхней части листа. Это формирует "клей" для склеивания слоев верхней и нижней половин Вашего робота вместе. Используйте бумажное полотенце, чтобы вытереть материал вокруг. Этот шаг является решающим - если Вы используете слишком много силиконовой резины, она будет забивать воздушные каналы робота. Если Вы не используете достаточно двух слоев, связи не будет. После того как Вы вылили материала на лист и распространили его вокруг, дайте ему около двух минут, прежде чем перейти к следующему шагу.

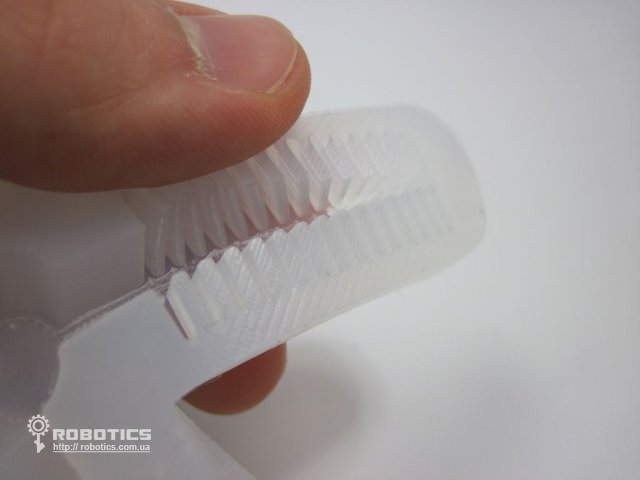
Шаг 10. Разместите верхнюю часть робота лицом вниз на новый слой силиконовой резины:
Возьмите кусок резины, который Вы достали в шаге 7. Это верхняя половина вашего робота. С одной стороны она должна быть гладкой, и одна сторона должна подвергаться хребтам, которые образуют внутренние воздушные каналы вашего робота. Аккуратно положите верхнюю половину на свежий слой силикона с новыми воздушными каналами вниз

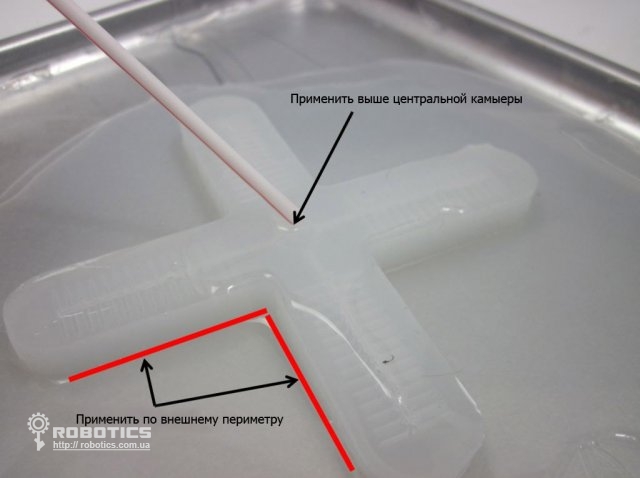
Шаг 11. Распространите резину по внешнему периметру робота:
Используйте мешалку для кофе или палочку от эскимо для дополнительного слоя свежей силиконовой резины вокруг внешнего периметра робота. Это поможет предотвратить утечку воздуха. Проверьте верхнюю часть робота для возникновения пузырьков воздуха. Вы можете применить небольшую каплю силикона непосредственно над этими пузырями – это будет способствовать укреплению этой области. Вы также должны добавить некоторые силиконовые укрепления непосредственно над большими, круговой и центральной камерами робота..
Шаг 12. Дайте слою клея остыть:
Подождите 4 часа при комнатной температуре (или 10 минут в духовке при температуре 150 ° F - следуя указаниям по технике безопасности в шаге 5) для "клеевого слоя", чтобы закрепить, соедините верхний и нижний слои робота вместе. Убедитесь, что новый слой и уплотнения вокруг внешнего периметра робота являются твердыми и эластичными (не липкие), прежде чем переходить к следующему шагу.

Шаг 13. Снимите слой с подноса:
Аккуратно снимите весь слой из вашего лотка. Будьте осторожны и делайте это медленно, чтобы не порвать резину. Если Вы использовали духовку, дайте подносу остыть, прежде чем прикасаться к нему.


Шаг 14. Разрежьте робота ножницами:
Используйте ножницы, чтобы вырезать внешний периметр робота, удаляя излишки материала. Будьте осторожны, чтобы не врезаться в робота и не проколоть воздушные каналы. Ничего страшного, если Вы оставите немного дополнительного материала по краям, на всякий случай.

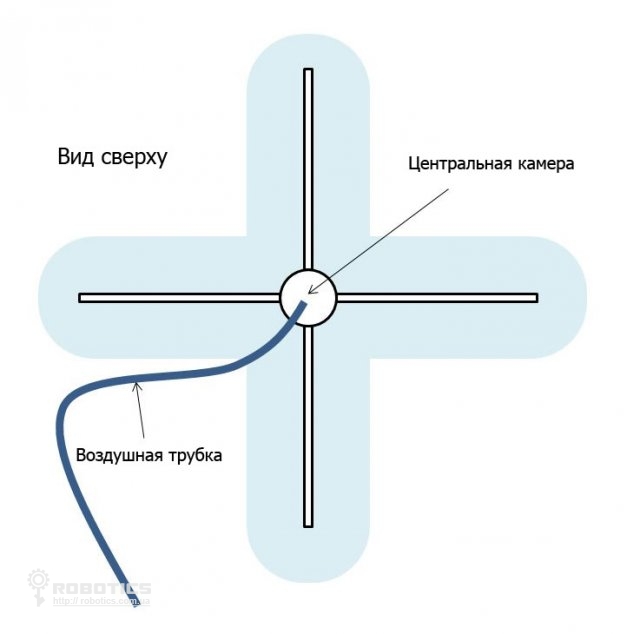
Шаг 15. Проколите робота воздушной трубкой:
Отрежьте примерно один фут полиэтиленовой трубки. Отрежьте один конец трубки под углом 45 градусов, так что острые - это будет сделать легче вставить трубку в робота. Проколите робота со стороны, под углом 45 градусов между двумя «ногами». Поместите круговую центральную камеру, которая соединяет четыре канала воздуха. Можно использовать что-то острое, как кончик карандаша или скрепки для бумаг, чтобы сделать отверстие, прежде чем вставить трубку. Убедитесь, что конец трубки проветривается в центральной камере воздухом.
Шаг 16. Подключите грушу:
Отрежьте один дюйм от резиновой трубки. Используйте этот кусок, как адаптер для подключения к полиэтиленовой трубке груши. Примечание. Если Вы используете Polaroid Super Blower, снимите маленький кусочек резины на конце пластикового сопла. Если Вы используете различные лампы, Вам, возможно, придется использовать дополнительный кусок резиновой трубки с разным диаметром, как адаптер.

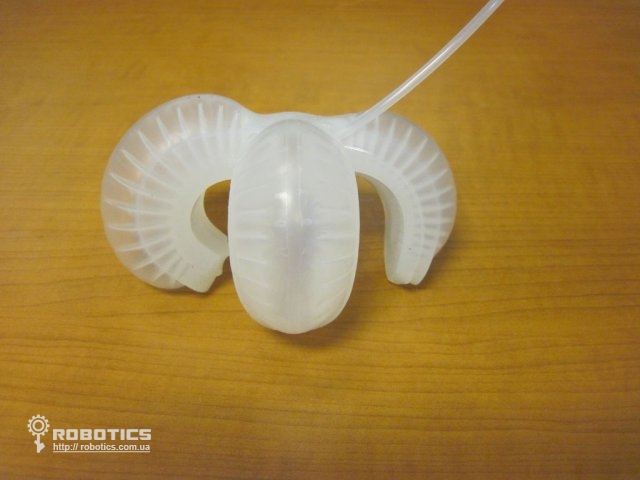
Шаг 17. Наполните воздухом:
Накачайте воздухом Ваш новый робот-захват! Это может занять более одного нажатия на грушу, чтобы полностью надуть робота. Вы можете использовать это, чтобы поднять различные объекты. Будьте осторожны, чтобы не раздуть Ваш захват чрезмерно – материал очень прочный, но он в конце концов может порваться. Если Ваш захват не работает с первой попытки, перейдите к следующему шагу и почитайте советы по устранению неполадок.



Шаг 18. Устранение неполадок:
Проверьте утечку воздуха. Если Ваш захват не срабатывает вообще, слушайте и прочувствуйте утечку воздуха при надавливании на грушу. Если у Вас есть утечка воздуха, Вы можете утилизировать её свежим слоем силиконовой резины, затем повторить попытку. Проверьте, не засорились ли каналы. Держите захват на ярком свете и посмотрите на внутренности воздушных каналов. Вы можете видеть их на все четырех ногах? Если вы видите только часть каналов, или их не видно вообще, они, вероятно, забиты, а значит, вы использовали слишком много "клея" в шаге 9. К сожалению, нет никакого способа восстановить это - вам придется начать с самого начала. К счастью, у вас должно остаться достаточно Ecoflex, и ваши формы, лампы и трубки для повторного использования. Убедитесь, что кончик воздушной трубки находится в центральной камере. Держите захват на свету и посмотрите на кончик воздушной трубки. Если вы не в полной мере прокололи внешнюю стену робота, или толкнули трубку слишком далеко, и в противоположную стену, то в конце робот будет закрыт резиной и предотвращен от попадания воздуха в каналы. Прокачайте воздушную трубку до кончика свободно в центральной камере. Некоторые ноги раздувать лучше, чем другие. Если все четыре ноги не раздуваются симметрично, сначала проверьте забитые воздушные каналы в каждой ноге, как описано выше. Если ни один из каналов не забит, но ноги до сих пор не раздуваются симметрично, Вы можете добавить некоторый дополнительный слой к силиконовым ногам. Материал имеет «нелинейное» поведение - это означает, что вместо того, чтобы всегда раздуваться постепенно с давлением воздуха, он не мог раздуться сразу. Таким образом, если одна нога немного слабее, чем другая (возможно, из-за некоторых небольших различий в толщине стенки от процесса формования), он может раздуться первую очередь, а другие не раздуются вообще. Укрепите эту ногу с дополнительным силиконовым материалом, чтобы предотвратить это неудобство.

")

")
")
")
")
")
")
")
")
")
")

")
")