


























")










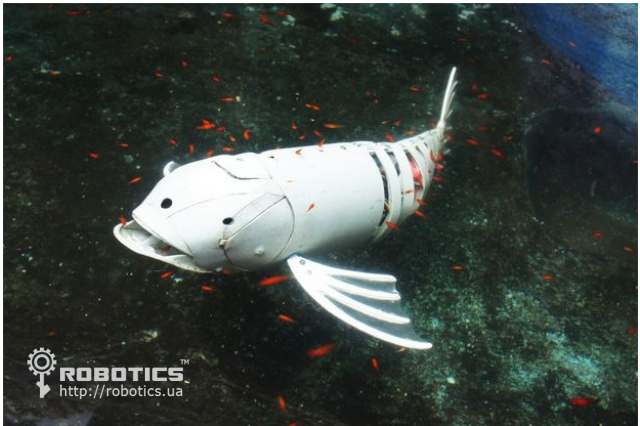
В этой инструкции показано подробно, как сделать своими руками робота-рыбу из обычной водопроводной трубы, который сможет плавать в воде и даже использоваться в промышленных целях. Для его создания понадобиться не так уже много материалов и времени…
Содержание:
- Введение
- Видеопрезентация
- Шаг 1. Необходимые материалы и инструменты
- Шаг 2. Голова
- Шаг 3. Тело
- Шаг 4. Хвостовая часть
- Шаг 5. Часть грудных и хвостовых плавников
- Шаг 6. Балласт
- Шаг 7. Защитная коробка
- Шаг 8. Сборка
- Шаг 9. Кожа робо-рыбы (по желанию)
- Шаг 10. Код для Arduino с библиотекой
Введение
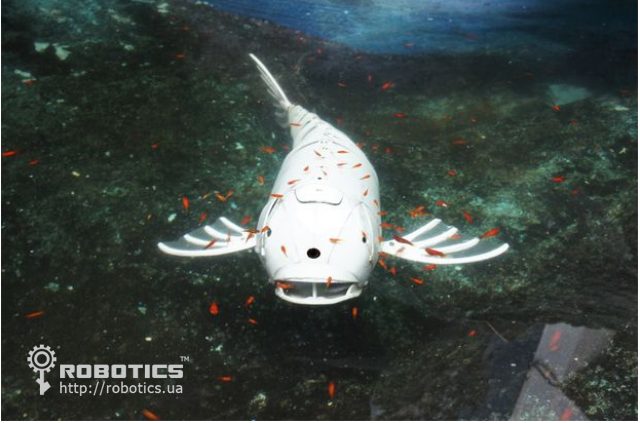
Данный робот-рыба изготовлен из ПВХ водопроводной трубы и представляет собой механизм с использованием водонепроницаемых сервоприводов и контроллера на базе Arduino Рro mini.
Стоит отметить, что несмотря на свой примитивизм, робот способен стать полезным инструментом для изучения подводных экосистем. Он может быть оснащен различными датчиками, такими как сенсоры рН, датчик глубины воды, сонар, камеры и так далее, чтобы определять качество воды и экосистемы в ней. Главное, что робот не будет пугать живых рыб и других животных водного мира.
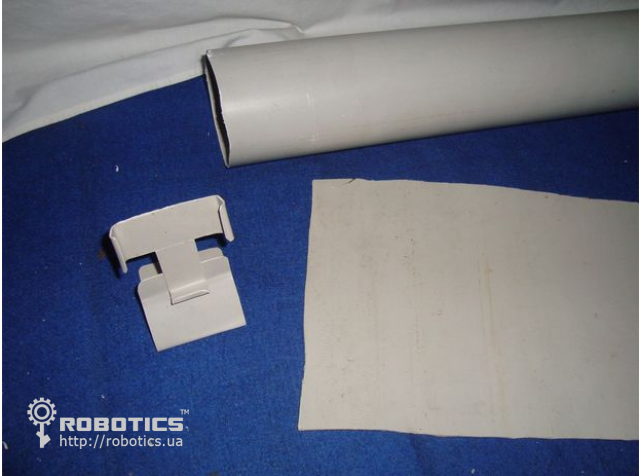
Шаг 1. Необходимые материалы и инструменты
1. 3 дюймовая пвх труба (можно использовать и меньше диаметр)

2. 5 водонепроницаемых серводвигателей

3. плата Arduino Pro mini
4. ИК пульт (подойдет от телевизора или музыкального центра)

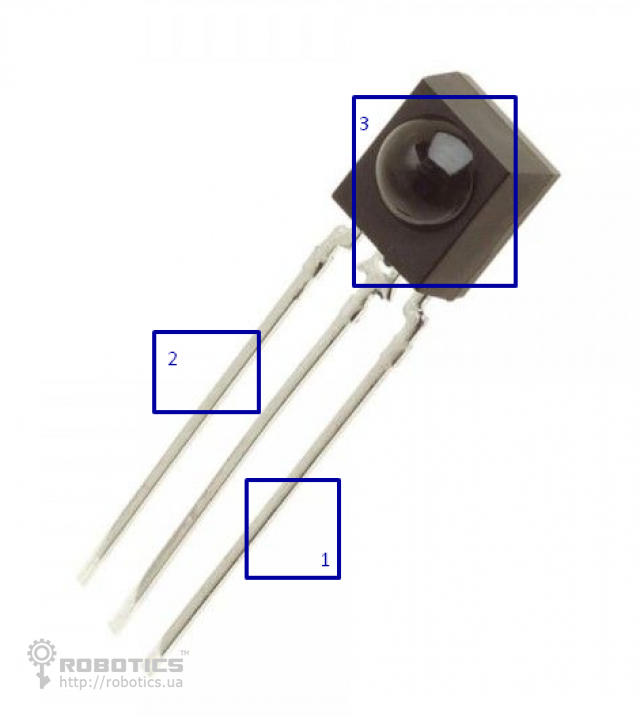
5. ИК приемник t-sop (1 - VCC, 2 – данные, 3 - ИК приемник)
6. защита питания Ubec

7. 2 lipo батареи 1000mAh
8. шприцы на 50 мл

9. 14 небольших пружин (можно взять из шариковых ручек)

10. использованный флакончик из-под духов

11. водонепроницаемая бумага для ткани
12. суперклей

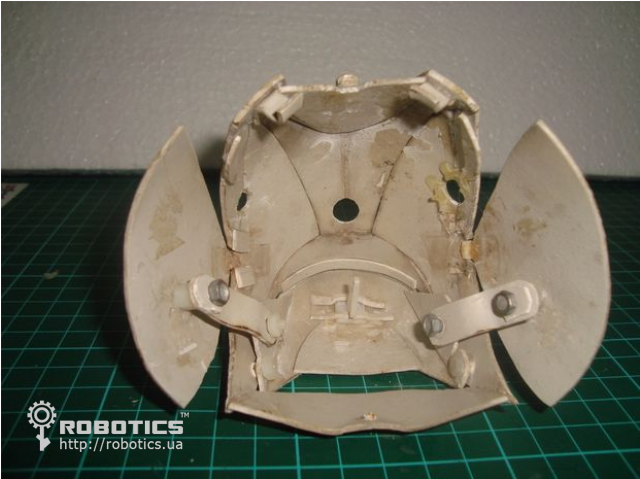
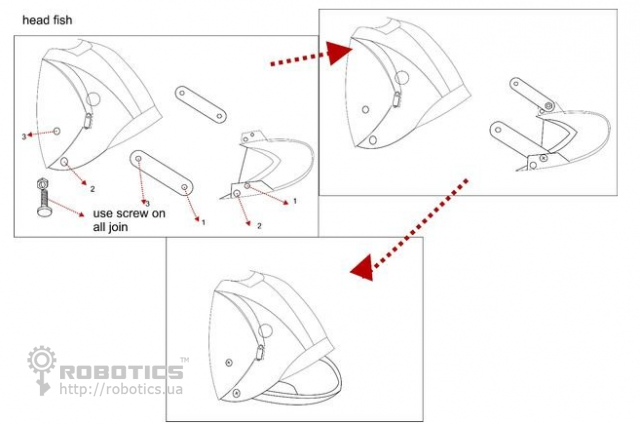
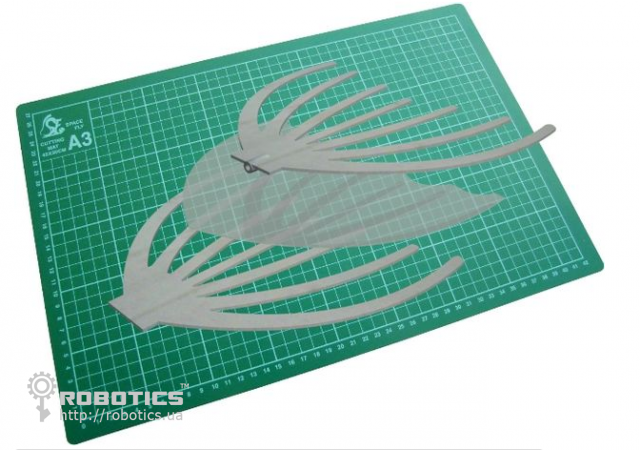
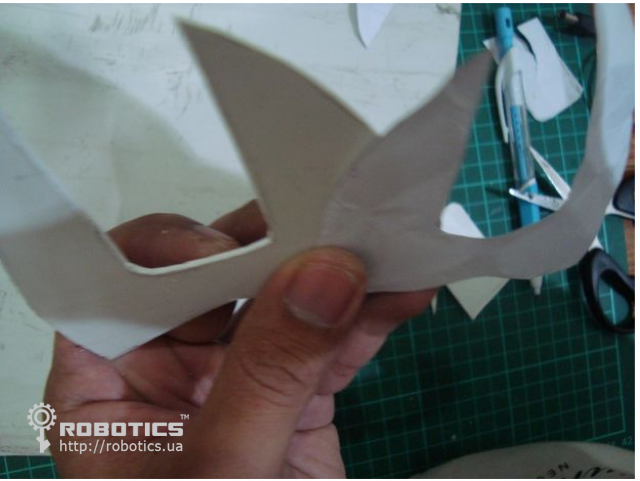
Шаг 2. Голова
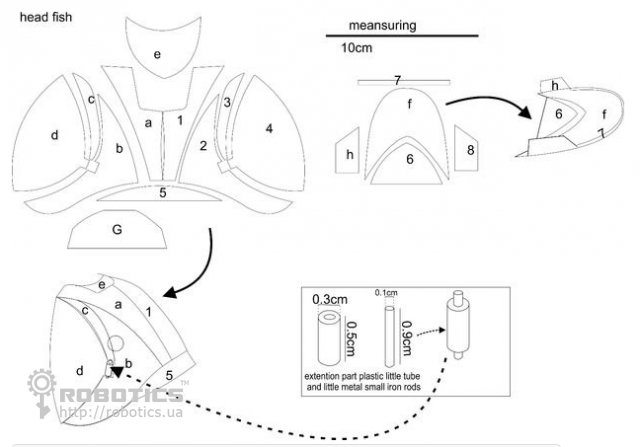
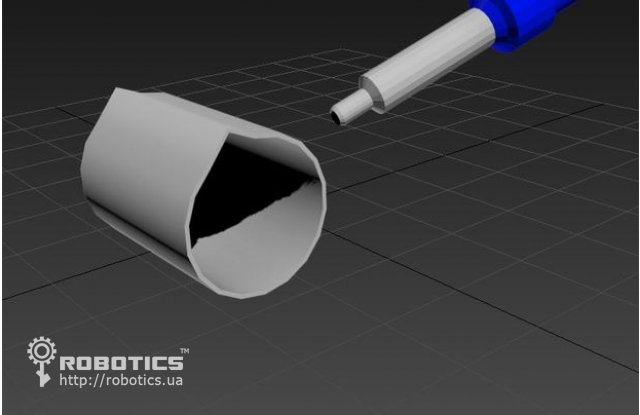
Сначала нужно подготовить материалы, которые вы будете использовать для создания головы робота-рыбы. Основным материалом является плоская водопроводная пвх труба.
Распечатайте шаблон и убедитесь, что размер объекта является правильным. Приложите шаблон к каждой стороне рисунка, как на фото для изгиба трубки. Для соединения каждой части используйте суперклей (будьте осторожны в этом процессе). Для покрытия жабр используйте небольшой шарнир таким образом, чтобы он мог перемещаться, когда оболочка открывается. Сделайте отверстие на губе и голове робота-рыбы. Соедините части с помощью винтов. В конце сделайте отверстие для винта на верхней части головы, чтобы соединить её с телом.

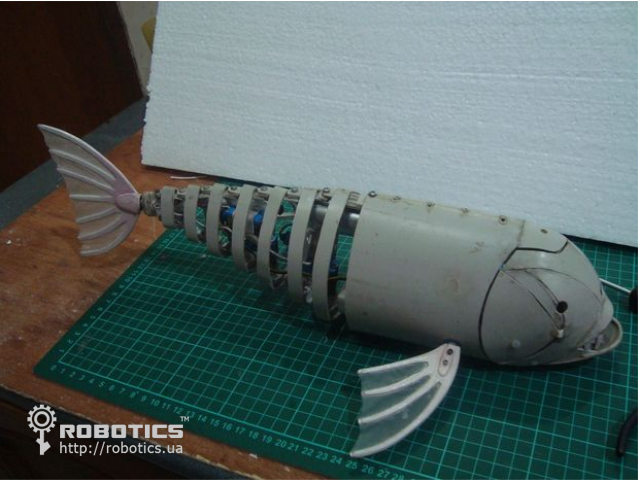
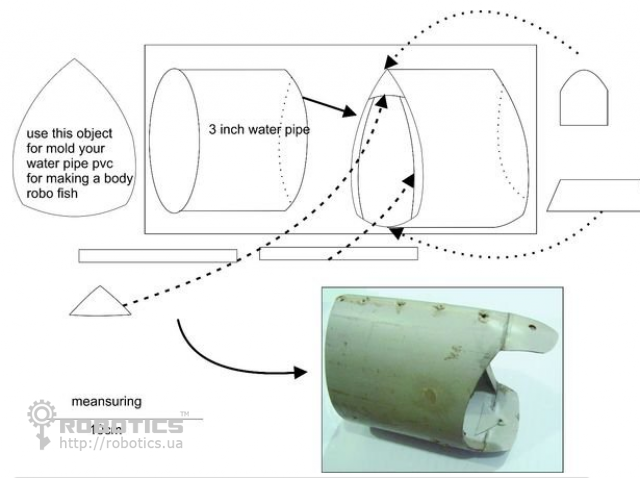
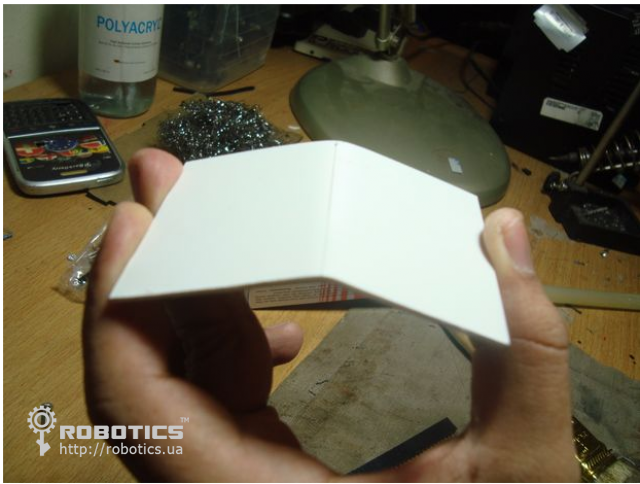
Шаг 3. Тело
Разрежьте водопроводную трубу вдоль на 10см. Сделайте ей форму, как показано на фото, чтобы можно было использовать воздуходувку для нагрева трубы. Чтобы сформировать пазы, отрежьте трубу с левой и правой стороны, как показано на фото. Далее порежьте часть на полосы и вставьте их в тело.



Шаг 4. Хвостовая часть
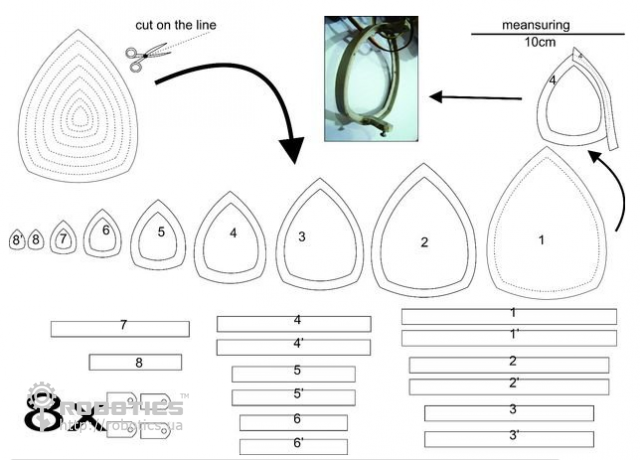
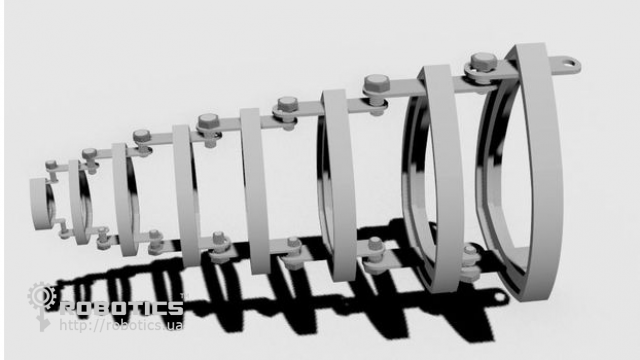
Хвост рыбы очень важен, потому что он является основной движущей силой. Распечатайте шаблон, представленный ниже, чтобы правильно соответствовать всем деталям. Нужно сделать 8 частей хвоста, состоящего из костей, начиная с наибольшей.
На приложенных фото показано, как создать формы и полосы из пвх. С помощью суперклея прикрепите небольшую пластину, а затем через резьбовые отверстия скрепить все части. Если все кости уже сформированы, пришло время объединить все части с помощью соединительной пластины от наименьшей кости или кончика хвоста. Используйте маленький, но длинный винт, чтобы прикрепить сервопривод, а также подготовьте небольшую пружину. Установите её на стороне кости слева и справа, так чтобы хвост оставался в прямом положении.



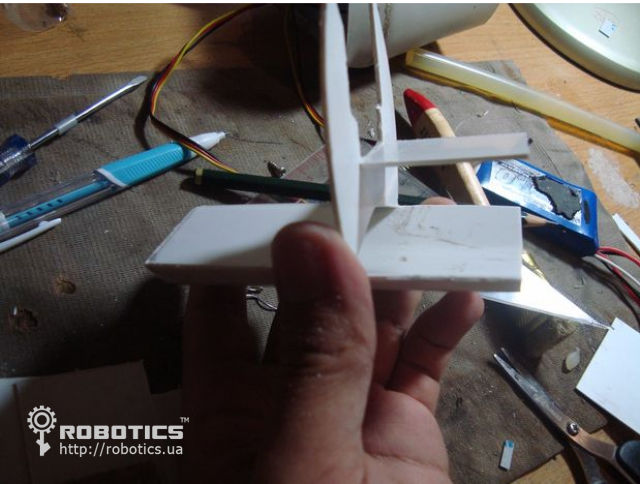
Шаг 5. Часть грудных и хвостовых плавников
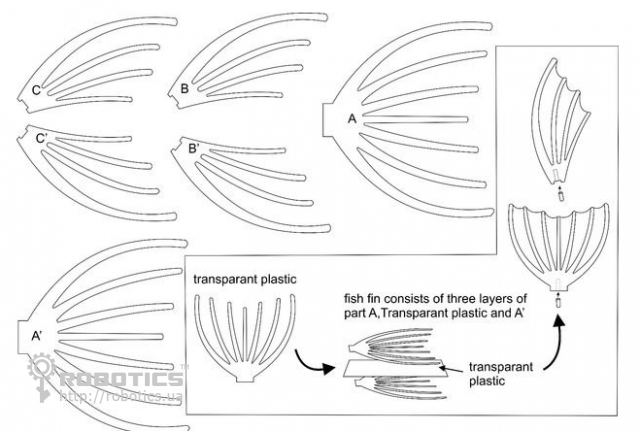
Так же, как в предыдущем шаге распечатайте шаблоны и сделайте макет на пласте ПВХ. Для каждого плавника нужно обеспечить также пластмассовую вставку между 2-х слоев уже сформированных частей с использованием суперклея. Присоедините также пластиковую вставку у основания плавников, чтобы соединить их с телом робота.
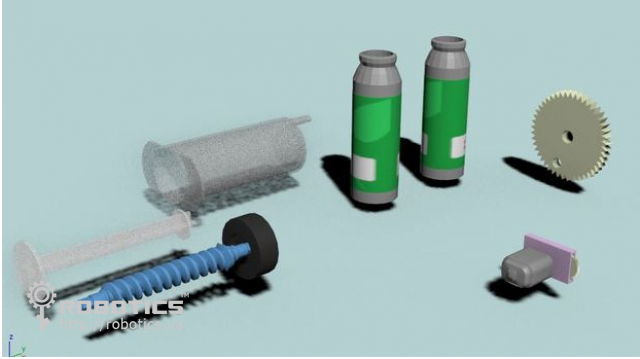
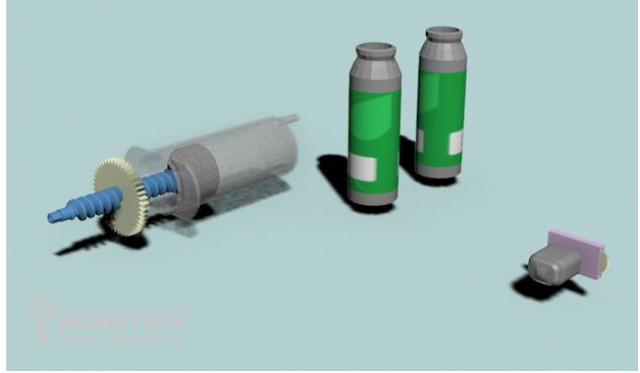
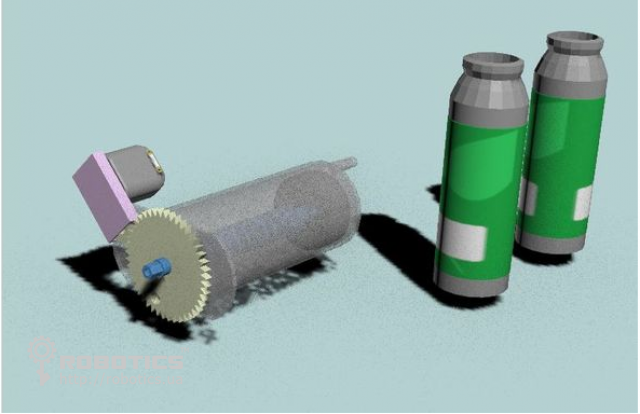
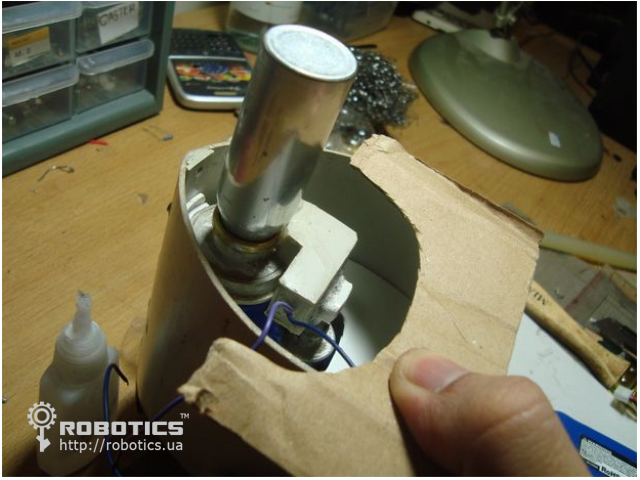
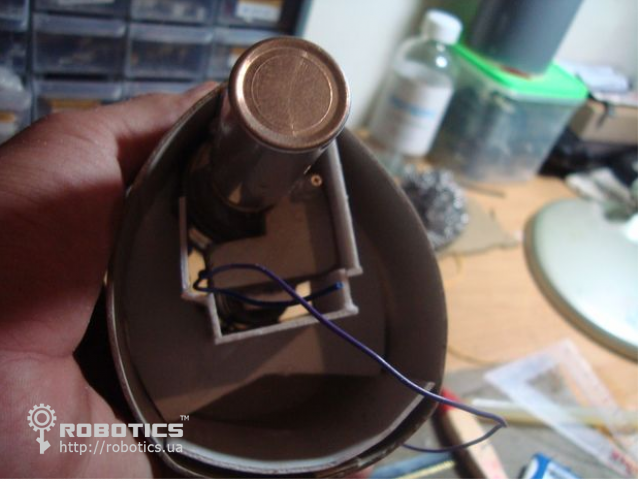
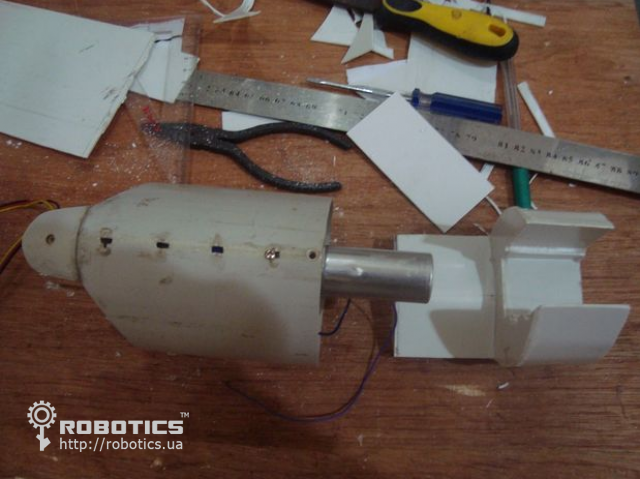
Шаг 6. Балласт
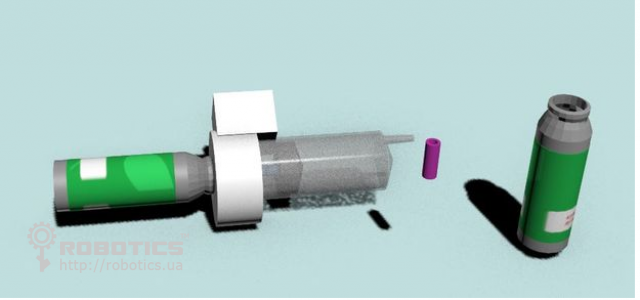
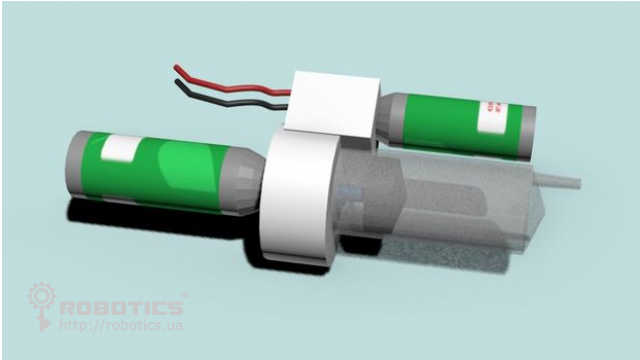
Эта часть немного сложнее. Вам нужны электронные компоненты, а также шприцы. Вытяните внутренний стержень от шприца и используйте только внешнюю часть. Подключите небольшой двигатель постоянного тока к шестерни, которая проведена к стержню.
Проверьте двигатель постоянного тока с блоком батареи, а затем прикрепите также флакончик из-под духов для уплотнения воздуха. Убедитесь, что оболочка хорошо герметизирована. Чтобы более подробно понять принцип, следуйте по изображениям:




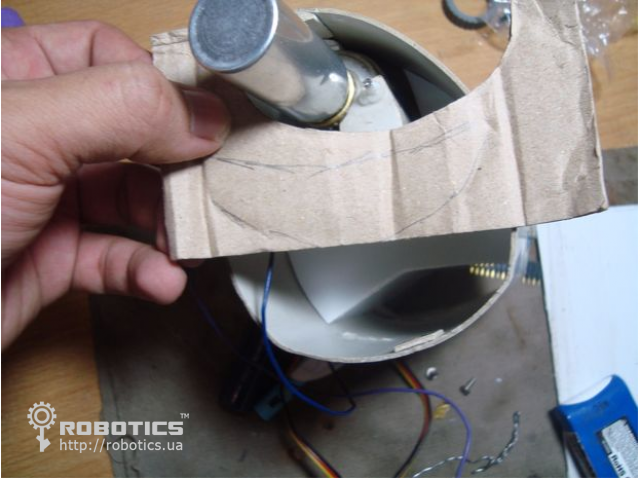
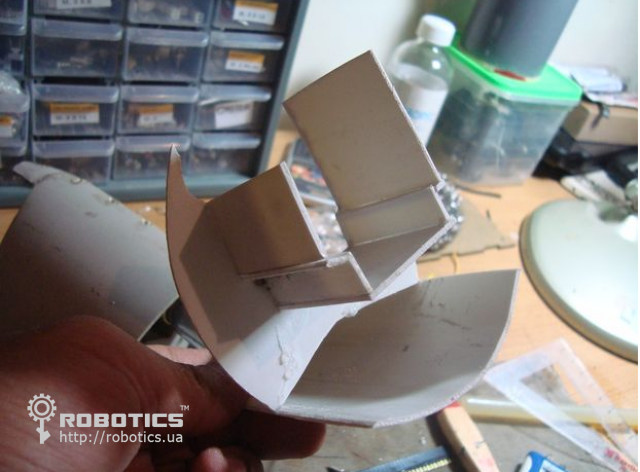
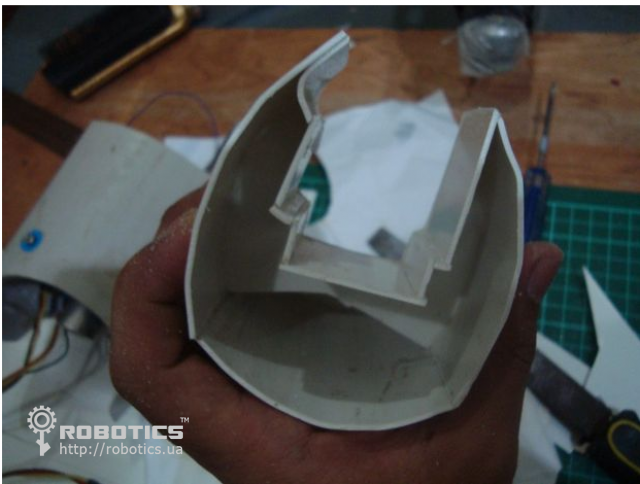
Шаг 7. Защитная коробка
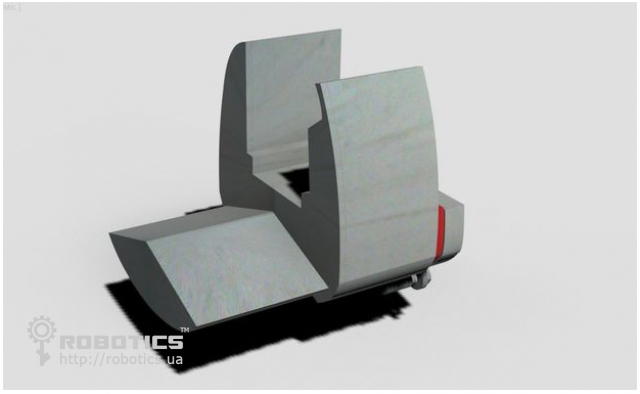
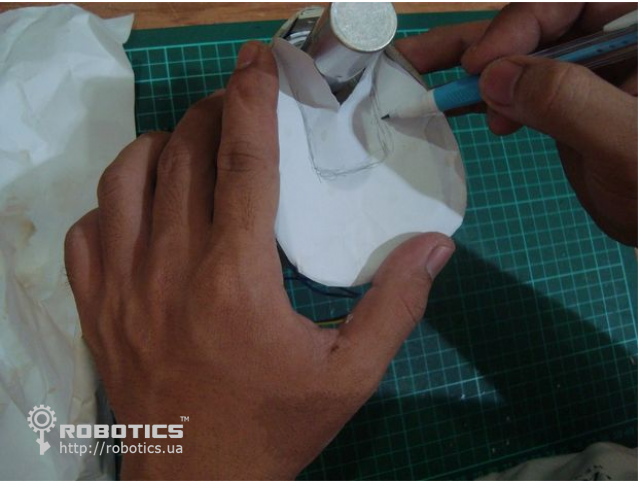
Эта коробка герметична для электронной системы. Для того, чтобы сделать её, вам нужен шаблон, выполненный на основе корпуса робота-рыбы, который будет помещен в его тело. Прежде чем сделать шаблон, должны быть установлены все компоненты в корпусе робота, в частности серводвигатели для плавников и балласта.
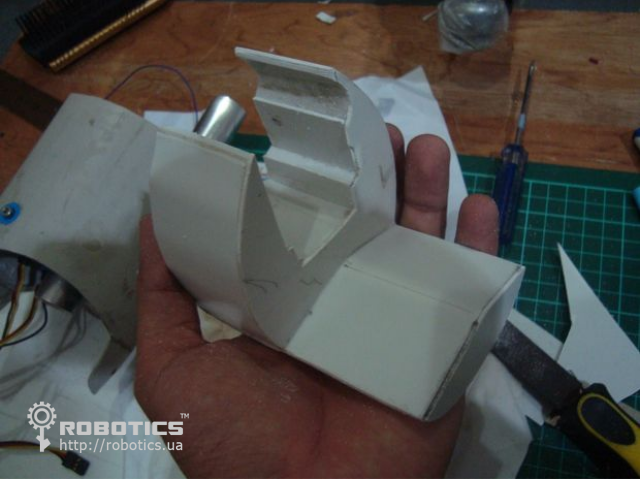
Используйте бумагу, чтобы сделать шаблон, и вырежьте по нему пласты из пвх размером примерно 7 см х 5 см. Сверните их под углом 100 градусов, чтобы использовать воздуходувку для нагрева. Соедините части сначала суперклеем. Следуйте по изображениям, чтобы сформировать коробку, соответствующую корпусу робота-рыбы.
Чтобы покрыть часть спины, можно установить специальную резиновую накладку, чтобы вода не попадала вовнутрь.





















Шаг 8. Сборка
Итак, после того, как все части сделаны, нужно собрать все это вместе. На передней части защитной коробки нужно сделать отверстия для электропроводки. Установите датчики и протяните провода серводвигателей, положите коробку, так чтобы не было никакого зазора для поступающей воды. Не забудьте установить T-sop (ИК-приемник в глаза робота-рыбы).
Далее прикрепите плавники, а также установите водонепроницаемый сервопривод. Вы можете использовать термоклей для того, чтобы прикрепить сервопривод, балласт и защитную коробку в тело робота, пару грудных плавников с помощью небольшого стержня одинакового размера с отверстием сервоприводов и хвостовые плавники. Прикрепите хвост рыбы, как показано на фото, и соедините голову с телом с помощью армированного провода, подготовленного раньше.
Далее нужно использовать Arduino Pro mini. Вы также должны установить драйвер Arduino для управления балластами, ubex для защиты электропитания и 2 батареями для управления с помощью пульта ДУ.



















Шаг 9. Кожа робо-рыбы (по желанию)
Вы можете сделать вашего робота максимально похожим на живую рыбу, добавив ему кожу. Чтобы сделать это, вам понадобиться тонкая марля, а также водонепроницаемая бумага, которая специально продается для одежды. Скачайте текстуру кожи рыбы, распечатайте и вставьте её на марлю с помощью утюга. Оберните полученную кожу вокруг тела рыбы и закрепите с помощью стежек.



Шаг 10. Код для Arduino с библиотекой
На данный момент робот управляется с ИК-пульта. Здесь требуется загрузка программы FTDI для Arduino Pro mini.
Чтобы иметь возможность использовать ИК-приемник на Arduino, вам нужна IR-библиотека. Скачайте Arduino-IRremote-master.rar и поместите в Arduino libllary с / ProgramFiles / Arduino / liblaries. Прежде чем скачать IR_receiver и загрузить программу, установите ИК-приемник, расположив правильно все контакты. Подключите FTDI к pro mini и к компьютеру. Загрузите IR_receiver, если все готово, откройте последовательный код и попытаетесь нажать любую кнопку, если на мониторе появляются числовые значения, то ИК уже работает.
Откройте ir_command_codes.h и измените значение для команды значением, которое вы получаете от каждой нажатой клавиши. Нажмите цифровые клавиши для правильного порядка значений, чтобы загрузить другие команды.
Наконец, загрузите исходный код Ir_robofish sourcode в Rar файл для тестового испытания.
Файлы
Arduino-IRremote-master.rar
ir_receiver.ino ir_receiver.ino
ir_roboFisttest_forward.rar ir_roboFisttest_forward.rar


")