





































Дослідники посвятили учасників конференції ICRA Robotics у процес створення еластичних датчиків для роботів
Фахівці Мюнхенського Інституту Робототехніки та Машинного Інтелекту (MIRM) при технічному університеті (TUM) представили процес створення м'яких інноваційних датчиків. Розподілений сенсор усередині оболонки має різні вимірювальні властивості. Такі датчики можуть огортати поверхню практично будь-якого об'єкта. Основними областями застосування цієї передової технології є робототехніка та протезування.
Навіщо роботам шкіра?
Дослідники наголошують на важливості сприйняття та відчуття роботом навколишнього середовища для успішної взаємодії з ним. Форми об'єктів, якими потрібно маніпулювати, має вирішальне значення, поряд з такими фізичними властивостями як еластичність і гнучкість. Сприйняття форми визначає здатність ефективно захоплювати, утримувати і маніпулювати предметами. Для цього і потрібні універсальні системи сенсорів, які можуть набути будь-якої форми, і бути встановлені на рухомі частини механізмів.

Однією з найважливіших завдань у галузі робототехніки та протезування є імітація сенсомоторних здібностей людини, особливо її рук. Для досягнення цієї мети в більшості робототехнічних пристроїв використовуються датчики, що вимірюють силу стиснення, тертя або крутного моменту. Однак будь-який традиційний датчик обмежений у своїй формі, і не може бути розподілений по поверхні. Розробка м'яких датчиків, які можуть бути адаптовані під будь-яку форму, стала важливим науковим досягненням. І хоч запропоноване рішення не таке досконале як людська шкіра, здатна одночасно аналізувати температуру, вологість, і текстуру, але воно відчиняє двері до базових властивостей, необхідних роботу, який повинен відчувати фізичний світ своїми руками.
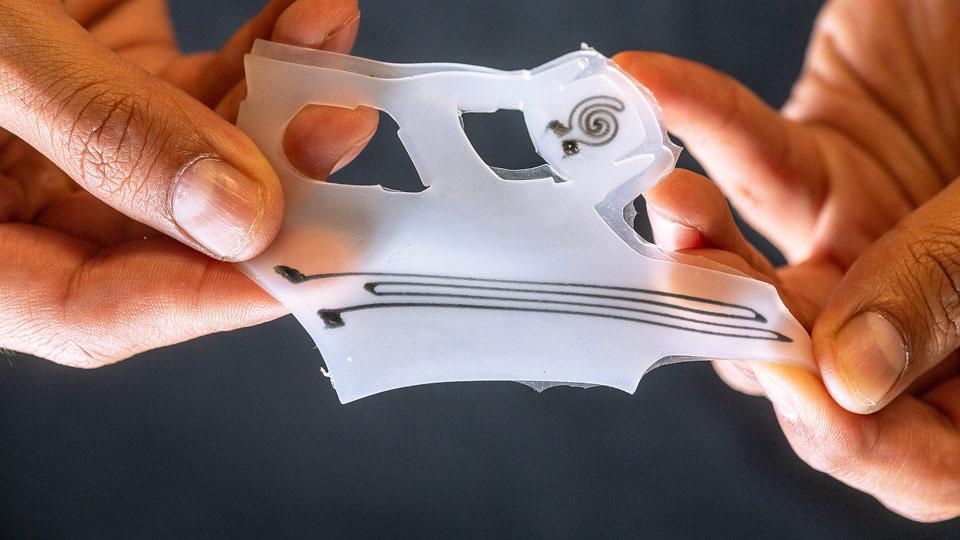
Технологія була представлена вченими Сонею Гросс та Дієго Ідальго на конференції ICRA Robotics у Лондоні. Її особливістю є використання еластичного матеріалу, який може огортати поверхню будь-якого об'єкта. Принцип роботи сенсора закладається під час розробки програмної структури сенсорної системи, яка у подальшому передається на 3D-принтер. Датчики створюються шляхом введення спеціальної електропровідної пасти у рідкий силікон. Коли оболонка із силікону твердне, паста в ній залишається рідкою. Тепер при зміні форми датчика змінюється його електричний опір, що дозволяє визначати рівень тиску та деформацію поверхні. Ця інновація дозволяє отримувати точні дані взаємодії штучної руки з середовищем.

Результати цього дослідження виявились надзвичайно перспективними для творців роботизованих пристроїв. Професор Самі Хаддін, виконавчий директор MIRM, підкреслює, що інтеграція м'яких датчиків створює нові можливості навіть у галузі штучного інтелекту, який тепер зможе аналізувати тактильне сприйняття. Сенсори надають цінні дані у режимі реального часу, значно розширюючи можливості взаємодії з фізичним світом. Цей новаторський підхід віщує нову еру, як мінімум, у розвитку робототехніки та протезування.







")



























 Що Це?")



