


























")










Собираем робота отвечающего за подсветку дома
Содержание:
- Введение
- Шаг 1. Материалы и принцип построения
- Шаг 2. Схема
- Шаг 3. ИК-маячок
- Шаг 4. Сборка и проверка
Введение:
На этот раз поговорим о фонариках. Эти вещи служат нам «солнцем» в руках, когда мы оказываемся в темноте. Разнообразие фонариков в настоящее время позволяет выбрать любой удобный для нас вариант. Но для инвалидов, а также для тех, у кого постоянно заняты руки, будет уместным использование источника света, который не требует ручного управления. Целью данного проекта является создание робота-фонарика, который будет следить за своим пользователем во всем помещении и откликаться на потребности пользователя в освещении.

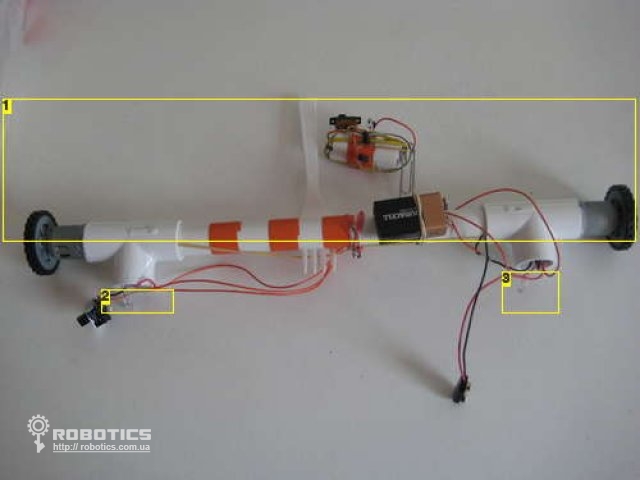
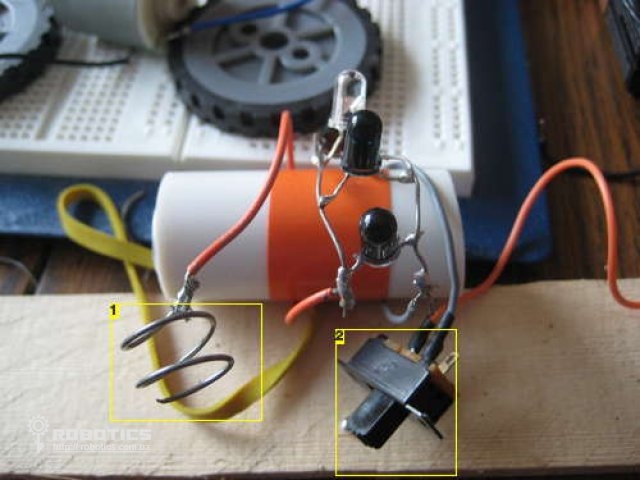
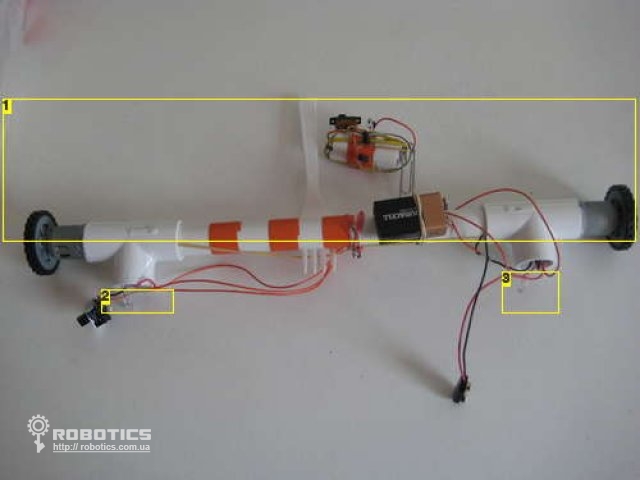
1 – окончательный вариант устройства, но без вспышки, 2 – фоторезистор расходится в этом месте, 3 - … и в этом
Шаг 1. Материалы и принцип построения
Этот робот следует инфракрасному маяку-сигналу, прикрепленному к одному из ботинок пользователя. Инфракрасное излучение генерируется посредствам четырех инфракрасных светодиодов, которые собраны из старых пультов от телевизора.
Робот основан на двух колесах с набора K'nex и работает с помощью двух небольших двигателей. Устройство контролируется входом из двух инфракрасных фототранзисторов на базе двух транзисторов NPN. Можно использовать фоторезисторы, а не фототранзисторы, но они имеют очень широкий угол чувствительности и не очень хорошо реагируют на инфракрасное излучение. Они также содержат токсичный металл кадмий, и их довольно трудно найти в магазинах. Фототранзисторы схожи по форме и размерам со стандартными светодиодами. Инфракрасные фототранзисторы широко доступны. Резисторы были необходимы для смещения транзистора.
Робот приводится в действие двумя коммутаторами, и работает от 3-х АА и 1-ой 9В батареи. Все, что нужно, устанавливается в небольшой поливинилхлоридной трубке, и резинки держат все детали вместе. K'nex колеса крепятся к двигателям с помощью термоклея. Одноразовая пластиковая вилка служит опорой для основы фонарика.
Отметим, что данная версия фонарика-робота является достаточно простой, и её можно усовершенствовать при желании.
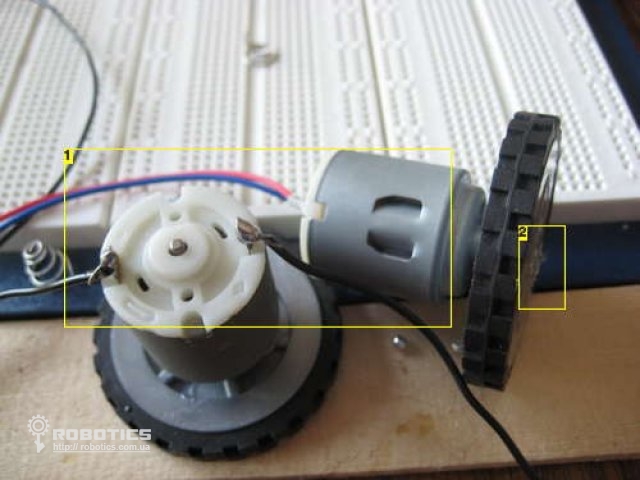
1 – двигатели не обязательно должны быть идентичными. Робот будет исправлять свою работу самостоятельно, так что разница между двигателями не имеет значения, 2 – термоклей
1 - много термоклея

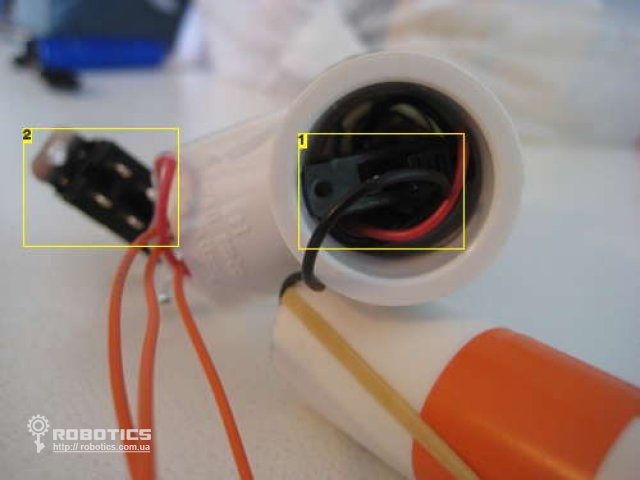
1 - переключатель. 2 - переключатель
Держатель для батарей:


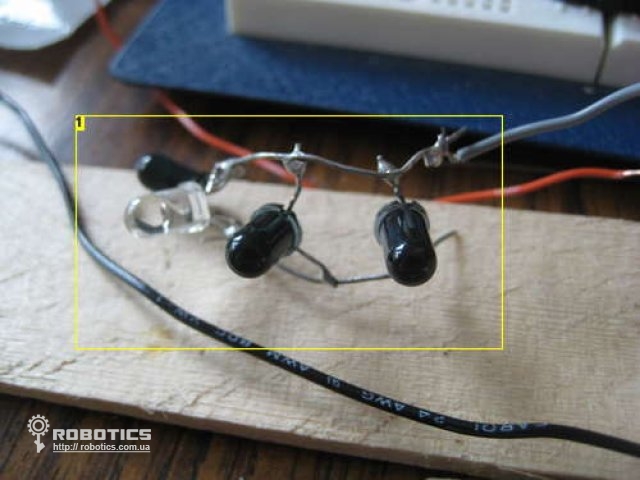
1 - диоды из старых пультов от ТВ
1 и 2 – эти контакты используются для основных деталей робота
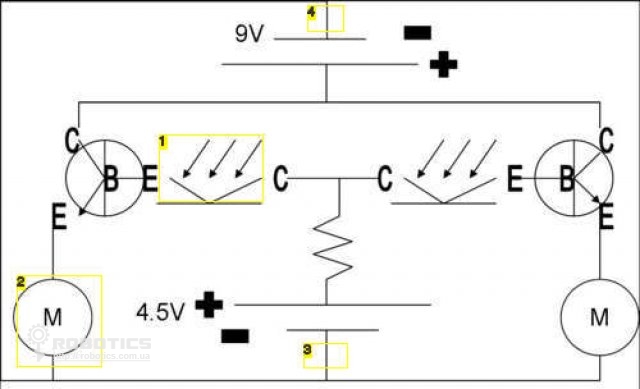
Шаг 2. Схема:
Схема предназначена для ускорения двигателя с одной стороны, если свет обнаруживается на противоположной стороне. Таким образом он поворачивается к свету. Это не работает идеально, но для такого простого решения он выполняет подсветку очень хорошо.
Уровень сопротивления можно определить, посмотрев на технические характеристики ваших транзисторов, фототранзисторов и двигателей. Экспериментируйте с различными резисторами, пока не достигнете скорости вращения двигателя, которая вас устроит.
Возможно, вам понадобиться добавить выключатель или даже два в эту схему для уверенности. Установите его так, чтобы он прерывал поток энергии с источников.
На картинке изображен графический макет схемы, которую нужно построить для работы устройства.
1 - фототранзистор. 2 - Контроллер двигателей, правый фототранзистор контролирует левый двигатель, и наоборот. 3 - возможное место выключателя. 4 - возможное месте выключателя.
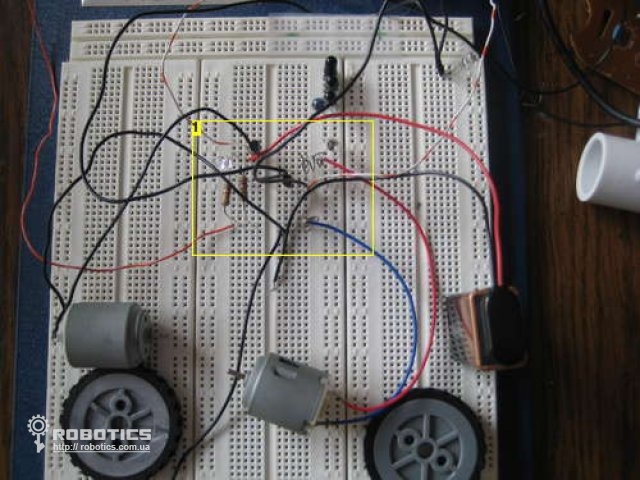
1 - полная схема без переключателей
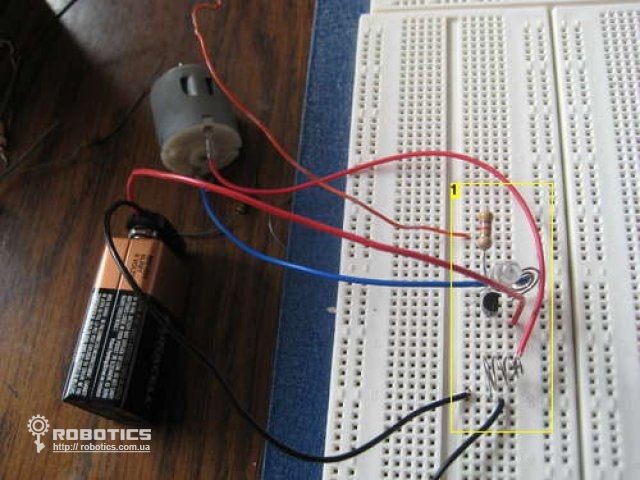
1 - фундаментальная схема управления
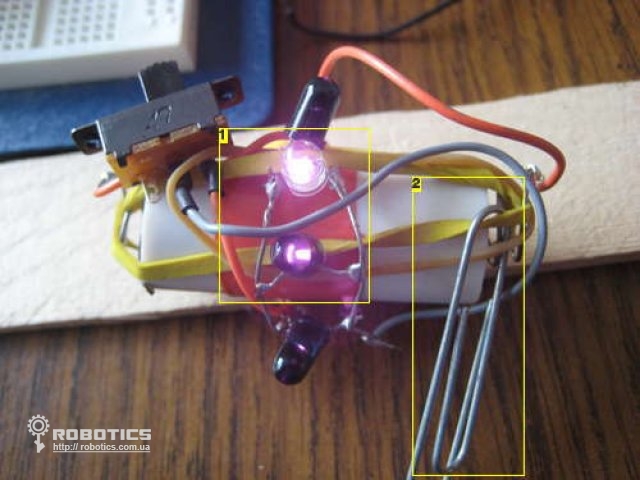
Шаг 3. ИК-маячок:
Инфракрасный маячок состоит из короткой поливинилхлоридной (ПВХ) трубки с одной батарейкой АА внутри. Резинка держит контакты, прикрепленные к батарее, а переключатель контролирует поставку энергии для четырех инфракрасных светодиодов, которые имеют параллельную связь между собой.
1 – этот свет практически незаметен невооруженным глазом, но камера чувствительна к ИК-свету, 2 – обычная скрепка для бумаги поможет прикрепить маячок к вашему ботинку, кроссовку, носку, в общем к чему угодно
Шаг 4. Сборка и проверка:
Припаяйте микросхему после длительных испытаний на борту прототипа. Установите все детали в корпус, и будьте уверенными, что фототранзисторы «торчат» из-под трубки и могут «видеть» маячок. Зайдите куда-нибудь в темное пространство и настройте робота на полу. Включите ИК-маячок и закрепите его на вашей обуви. Настройте робота и попытайтесь походить вокруг. Что он делает?
Возможно, придется сделать много изменений в схеме для того, чтобы заставить эту вещь небрежно следовать за вами. Однако, это просто сырой первый вариант такого устройства, и мы надеемся, что его можно развивать в очень функциональный, стильный фонарик, который не обязательно включать и держать в руках. Такой рабочий продукт может также управлять вашим зонтиком или напитком. Ещё его можно применять в самых разных ситуациях, например, в аэропорту фонарик может свободно следовать за своим хозяином, чтобы тот мог нормально рассмотреть и найти свой чемодан.
Конечно, к этому устройству можно добавить программное обеспечение для распознавания объектов и людей, и использовать его, как высокотехнологичный проект. Существует много информации о фототранзисторах, которые могут быть отдаленно связаны между собой. Мы считаем, что способность устройства следовать за его владельцем, дает ему новое измерение интерактивности, и мы надеемся увидеть ещё подобных интересных роботов, которые делают именно это.
1 – окончательный вариант устройства, но без вспышки, 2 – фоторезистор расходится в этом месте, 3 - … и в этом;
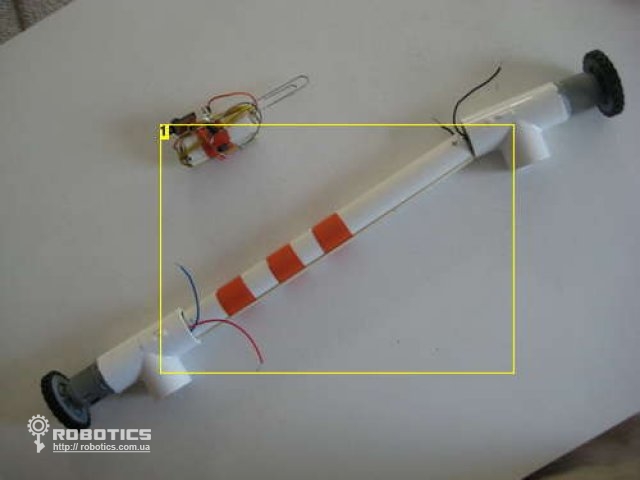
1 - корпус и двигатели, а также другие компоненты внутри корпуса

")

")
")
")
")
")
")
")
")
")
")

")
")