































Робот з м'якого матеріалу своїми руками
Зміст:
- Введення
- Необхідні матеріали
- Крок 1. Шаблон для 3D-печати
- Крок 2. Підготовка силіконових гумових сумішей
- Крок 3. Налийте мікстуру у форму
- Крок 4. Налийте мікстуру на піднос
- Крок 5. Суміш повинна застигнути
- Крок 6. Перевірте, чи застигла гума
- Крок 7. Дістаньте гуму з форми
- Крок 8. Змішайте свіжу порцію силіконової гуми
- Крок 9. Розкладіть тонкий шар нової силіконової гуми поверх першого шару
- Крок 10. Розмістіть верхню частину робота обличчям вниз на новий шар силіконової гуми
- Крок 11. Розповсюдьте гуму по зовнішньому периметру робота
- Крок 12. Дайте шару клею остигнути
- Крок 13. Зніміть шар з підноса
- Крок 14. Розріжте робота ножицями
- Крок 15. Проколіть робота повітряною трубкою
- Крок 16. Підключіть грушу
- Крок 17. Наповніть повітрям
- Крок 18. Усунення неполадок
М'якотілі роботи є останнім писком моди в робототехниці різних наукових співтовариств. Забудьте все, що Ви зазвичай чули про роботів і машини - шестерні, шківи, друковані плати, алюміній і сталь. Ці роботи зроблені з м'якого матеріалу, каучуку, що розтягується, і пластмаси, а управляються за допомогою стислого повітря в результаті хімічної реакції, і матеріалів, які змінюють форму за рахунок електричного струму або напруги.
У цьому проекті ми опишемо, як зробити простого, пневматичного м'якого робота, який зроблений з силіконової гуми, і форми з використанням 3D друкарських деталей. Проект грунтований на м'яких захопленнях і крокуючому механізмі, спочатку розробленому групою Уайтсайдс в Гарвардському університеті. У рамках проекту потрібно доступ до 3D-принтеру, або ви можете замовити 3D друкарських форм з таких джерел онлайн друку, як Shapeways, Sculpteo або iMaterialise.


Необхідні матеріали:
- Ecoflex 00-30(одного пробного комплекту вистачає, щоб зробити 5-10 роботів залежно від їх розміру)
- 1/16 "ID, 1/8" OD поліетиленові трубки(номер 5181K15 на McMaster - Carr), приблизно один фут
- 1/8 "ID, 1/4" OD силіконової гумової трубки(номер 5236K832 на McMaster - Carr), приблизно один дюйм
- груша: ми рекомендуємо "Polaroid Super Blower з високопродуктивною силіконовою кремнієвою грушею". Доступна на Amazon.com і ritzcamera.com.
- 3D-печатные форми(STL файл доступний в якості додатка до цієї сторінки)
- пластиковий піднос або металевий лоток для випічки
- одноразові гумові рукавички
- ножиці
- пластикові колби(склянки)
- кава-мішалка або паличка ескімо
- паперові рушники для очищення
- (додатково) духовка. Не користуйтеся пристроєм, який Ви також використовуєте для приготування їжі.
Крок 1. Шаблон для 3D-печати:
Якщо Ви є власником, або маєте доступ до 3D-принтеру, роздрукуйте свої власні форми. Є багато недорогих "робочих" 3D-принтеров, доступних на ринку, таких як Makerbot, Cube, і UP. Якщо у вас немає доступу до 3D-принтеру, Ви можете замовити форму інтернет-постачальника, як Shapeways, Sculpteo або iMaterialise. Не забудьте вибрати матеріал з гладкою обробкою поверхні. Інакше буде важко(чи неможливо) видалити силіконову гуму з Вашої форми. Досвідченим користувачам: якщо у Вас є доступ до програмного забезпечення CAD, Ви безумовно можете створювати свої власні форми, замість використання файлу для завантаження. У статті "М'яка робототехника для хіміків" додатковий матеріал забезпечує відмінне введення в різні типи і форми, прес-форми і в результаті руху робота.

Крок 2. Підготовка силіконових гумових сумішей :
По техніці безпеки : Ecoflex - це вид силіконової гуми для литва, зроблений Smooth - On Inc. Ecoflex поставляється в двох пляшках, що містять частини А і В. Частини А і В є рідинами - при змішуванні разом, вони зміцнюють і утворюють силіконову гуму(впродовж 4 годин при кімнатній температурі або 10 хвилин при 150 ° F). Матеріали не токсичні і дуже прості. Проте, відповідно до даних по безпеці матеріалів(MSDS), "повторна або тривала" дія незмішаних матеріалів може викликати легке роздратування шкіри. Ми рекомендуємо використати одноразові рукавички при роботі з незмішаним матеріалом. Якщо частина А або B потрапить на Вашу шкіру, просто змийте її водою з милом. Змішайте частини А і В Ecoflex в співвідношенні 50/50, використовуючи паперові або пластикові колби. Ви не повинні використати увесь Ecoflex - заповніть одну чашку і накрийте кришкою назад банки Ecoflex, і збережете іншу частину матеріалу, щоб зробити ще роботів. Суміш перемішайте в течію близько двох хвилин.

Крок 3. Налийте мікстуру у форму:
Повільно влийте змішаний Ecoflex у вашу 3D-печатную форму. Матеріал дуже в'язкий, тому він тектиме повільніше. Не лийте занадто швидко! Заповніть форму до верхнього краю. Після заповнення почекайте близько п'яти хвилин, щоб на суміші з'явилися пухирі. Ви можете завадити бульбашки повітря кави мішалкою, олівцем або ручкою, щоб прискорити процес.

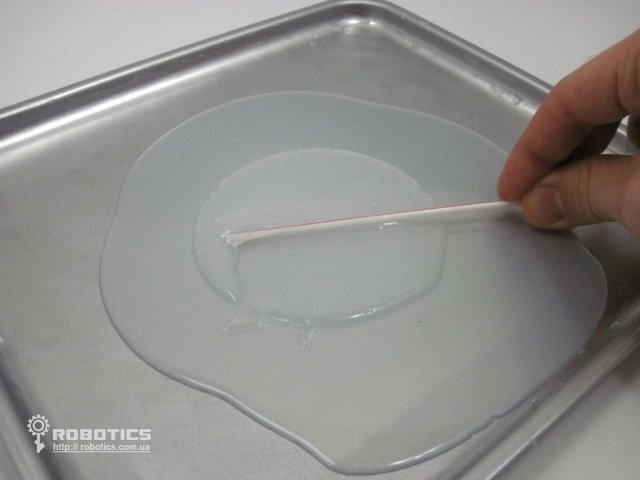
Крок 4. Налийте мікстуру на піднос:
Налийте решту Ecoflex на піднос. Переконайтеся, що він утворив досить велику калюжу, щоб повністю оточити зовнішній периметр пластикової форми. Якщо Ви збираєтеся зробити декілька роботів, Ви можете заповнити увесь піднос. Шар має бути завтовшки в декілька міліметрів.

Крок 5. Суміш повинна застигнути:
Тепер Ви повинні необроблений Ecoflex вилити на Ваш пластиковий піднос. Нехай матеріал постоїть впродовж 4 годин, і він буде міцним при кімнатній температурі. Додатково: якщо у Вас є доступна духовка і Ви використайте металевий піднос, Ви можете приготувати матеріал впродовж 10 хвилин при температурі 150 градусів за Фаренгейтом.

Вказівки по техніці безпеки :
- не використайте духовку, яка також використовується в приготуванні їжі
- не ставте пластиковий лоток в духовку
- ретельно перевірте температуру плавлення матеріалу Ваших 3D-печатных форм. Пластик ABS не плавитиметься при 150 ° F, але Ваш матеріал може бути різним.
Крок 6. Перевірте, чи застигла гума:
Через 4 години при кімнатній температурі(чи 10 хвилин в духовці при температурі 150 градусів за Фаренгейтом), Ваш Ecoflex має бути твердим. Спробуйте матеріал на дотик. Він повинен мати гумову форму, але не має бути клейким. Він також повинен стати трохи непрозорим. Якщо матеріал ще липкий і прилипає до пальців, то треба більше часу для застигання. Увага: якщо Ви використали духовку, ваш металевий піднос з матеріалом буде гарячим. Використайте рукавички, щоб дістати їх з духовки і дайте їм остигнути перш, ніж Ви поводитиметеся безпосередньо з ними.
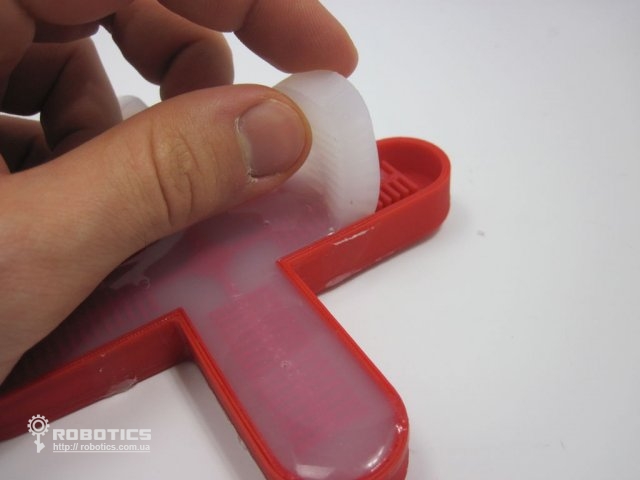
Крок 7. Дістаньте гуму з форми:
Акуратно дістаньте силіконову гуму з форми, починаючи із зовнішнього краю. Будьте обережні і робіть це повільно. Якщо Ви це зробите занадто швидко, матеріал може порватися.


Крок 8. Змішайте свіжу порцію силіконової гуми :
Використовуючи нову чашку, змішайте свіжу порцію Ecoflex в співвідношенні 50/50 компонентів А і B. Вам треба усього лише невелику кількість в цьому кроку - досить, щоб нанести тонкий шар, навіть з покриттям завтовшки 1 мм на плоскому листі на деко для випічки.
Крок 9. Розкладіть тонкий шар нової силіконової гуми поверх першого шару:
Нанесіть тонким рівним шаром(близько 1 мм завтовшки) свіжо-змішану силіконову гуму на верхній частині листа. Це формує "клей" для склеювання шарів верхньою і нижньою половин Вашого робота разом. Використайте паперовий рушник, щоб витерти матеріал навкруги. Цей крок є вирішальним - якщо Ви використовуєте надто багато силіконової гуми, вона забиватиме повітряні канали робота. Якщо Ви не використовуєте досить двох шарів, зв'язку не буде. Після того, як Ви вилили матеріалу на лист і розповсюдили його навкруги, дайте йому близько двох хвилин, перш ніж перейти до наступного кроку.

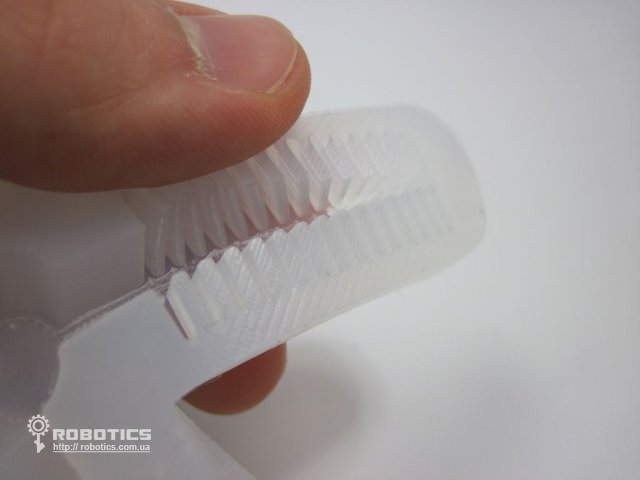
Крок 10. Розмістіть верхню частину робота обличчям вниз на новий шар силіконової гуми :
Візьміть шматок гуми, який Ви дістали в кроці 7. Це верхня половина вашого робота. З одного боку вона має бути гладкою, і одна сторона повинна піддаватися хребтам, які утворюють внутрішні повітряні канали вашого робота. Акуратно покладете верхню половину на свіжий шар силікону з новими повітряними каналами вниз.

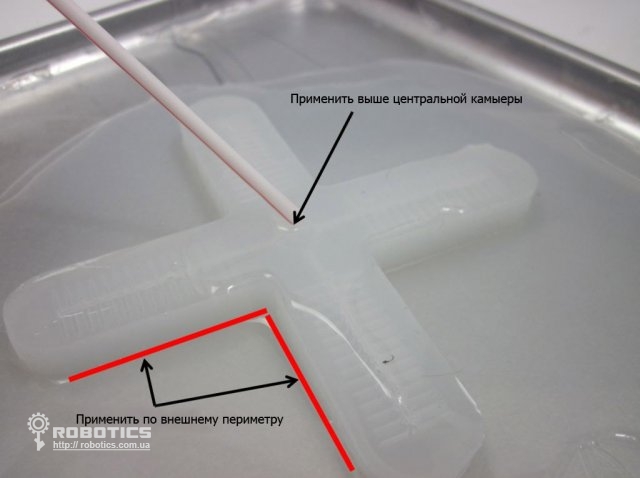
Крок 11. Розповсюдьте гуму по зовнішньому периметру робота :
Використайте мішалку для кави або паличку від ескімо для додаткового шару свіжій силіконової гуми навколо зовнішнього периметра робота. Це допоможе запобігти витоку повітря. Перевірте верхню частину робота для виникнення бульбашок повітря. Ви можете застосувати невелику краплю силікону безпосередньо над цими пухирями - це сприятиме зміцненню цієї області. Ви також повинні додати деякі силіконові укріплення безпосередньо над великими, круговою і центральною камерами робота.
Крок 12. Дайте шару клею остигнути:
Почекайте 4 години при кімнатній температурі(чи 10 хвилин в духовці при температурі 150 ° F - наслідуючи вказівки по техніці безпеки в кроці 5) для "клейового шару", щоб закріпити, з'єднаєте верхній і нижній шари робота разом. Переконайтеся, що новий шар і ущільнення навколо зовнішнього периметра робота є твердими і еластичними(не липкі), перш ніж переходити до наступного кроку.

Крок 13. Зніміть шар з підноса:
Акуратно зніміть увесь шар з вашого лотка. Будьте обережні і робіть це повільно, щоб не порвати гуму. Якщо Ви використали духовку, дайте підносу остигнути, перш ніж торкатися до нього.


Крок 14. Розріжте робота ножицями:
Використайте ножиці, щоб вирізувати зовнішній периметр робота, видаляючи надлишки матеріалу. Будьте обережні, щоб не врізатися в робота і не проколоти повітряні канали. Нічого страшного, якщо Ви залишите трохи додаткового матеріалу по краях, про всяк випадок.

Крок 15. Проколіть робота повітряною трубкою:
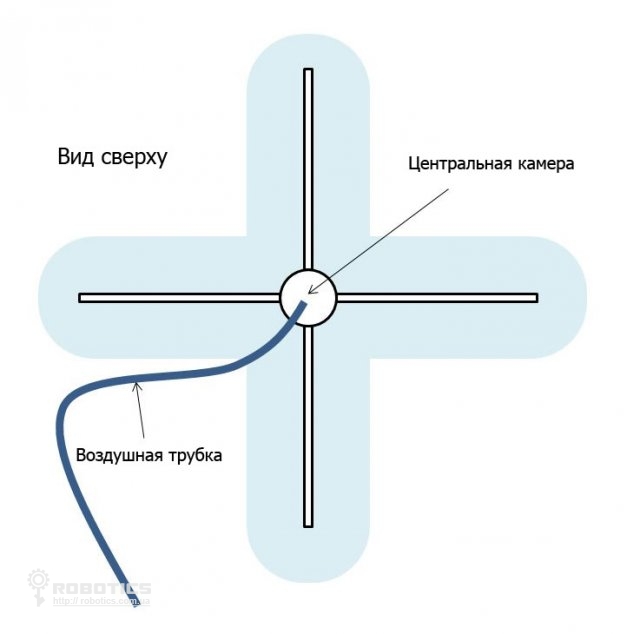
Відріжте приблизно один фут поліетиленової трубки. Відріжте один кінець трубки під кутом 45 градусів, так що гострі - це буде зробити легше вставити трубку в робота. Проколіть робота з боку, під кутом 45 градусів між двома "ногами". Помістіть кругову центральну камеру, яка сполучає чотири канали повітря. Можна використати щось гостре, як кінчик олівця або скріпки для паперів, щоб зробити отвір, перш ніж вставити трубку. Переконайтеся, що кінець трубки провітрюється в центральній камері повітрям.
Крок 16. Підключіть грушу:
Відріжте один дюйм від гумової трубки. Використайте цей шматок, як адаптер для підключення до поліетиленової трубки груші. Примітка. Якщо Ви використовуєте Polaroid Super Blower, зніміть маленький шматочок гуми на кінці пластикового сопла. Якщо Ви використовуєте різні лампи, Вам, можливо, доведеться використати додатковий шматок гумової трубки з різним діаметром, як адаптер.

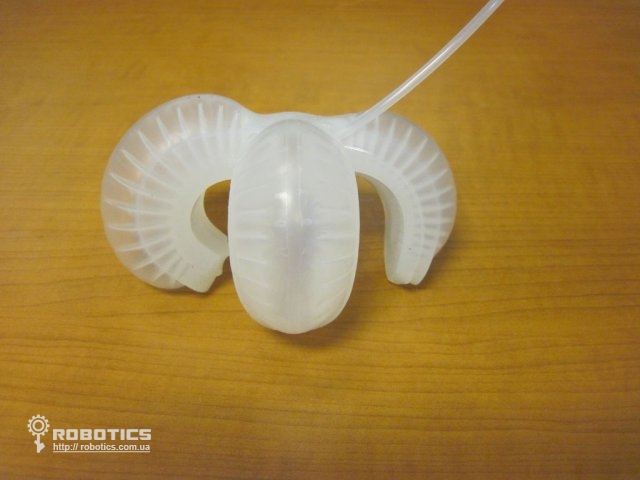
Крок 17. Наповніть повітрям:
Накачайте повітрям Ваше нове робот-захоплення! Це може зайняти більше за одне натиснення на грушу, щоб повністю надути робота. Ви можете використати це, щоб підняти різні об'єкти. Будьте обережні, щоб не роздути Ваше захоплення надмірно - матеріал дуже міцний, але він врешті-решт може порватися. Якщо Ваше захоплення не працює з першої спроби, перейдіть до наступного кроку і шануйте раді з усунення неполадок.



Крок 18. Усунення неполадок :
Перевірте витік повітря. Якщо Ваше захват не спрацьовує взагалі, слухайте і відчуйте витік повітря при натисканні на грушу. Якщо у Вас є витік повітря, Ви можете утилізувати її свіжим шаром силіконової гуми, потім спробувати ще раз. Перевірте, чи не засмітилися канали. Тримайте захоплення на яскравому світі і подивіться на нутрощі повітряних каналів. Ви можете бачити їх на все чотирьох ногах? Якщо Ви бачите тільки частину каналів, або вони не видно взагалі, вони, ймовірно, забиті, тобто ви використали надто багато "клею" в кроці 9. На жаль, немає ніякого способу відновити це - Вам доведеться почати із самого початку. На щастя, у вас повинно залишитися досить Ecoflex, і Ваші форми, лампи і трубки для повторного використання. Переконайтеся, що кінчик повітряної трубки знаходиться в центральній камері. Тримайте захоплення на світлі і подивіться на кінчик повітряної трубки. Якщо Ви не повною мірою прокололи зовнішню стіну робота, або штовхнули трубку занадто далеко, і в протилежну стіну, то у кінці робот буде закритий гумою і відвернений від попадання повітря в канали. Прокачайте повітряну трубку до кінчика вільно в центральній камері. Деякі ноги роздувати краще, ніж інші. Якщо усі чотири ноги не роздуваються симетрично, спочатку перевірте забиті повітряні канали в кожній нозі, як описано вище. Якщо жоден з каналів не забитий, але ноги досі не роздуваються симетрично, Ви можете додати деякий додатковий шар до силіконових ніг. Матеріал має "нелінійну" поведінку - це означає, що замість того, щоб завжди роздуватися поступово з тиском повітря, він не міг роздутися відразу. Таким чином, якщо одна нога трохи слабкіша, ніж інша (можливо, із-за деяких невеликих відмінностей в товщині стінки від процесу формування), він може роздутися першу чергу, а інші не роздуються взагалі. Зміцніть цю ногу з додатковим силіконовим матеріалом, щоб запобігти цій незручності.

")

")
")
")
")
")
")
")
")
")
")

")
")