





































Збираємо простого робота, який рухається як рак - Lobsterbot
Зміст:
Вступ:
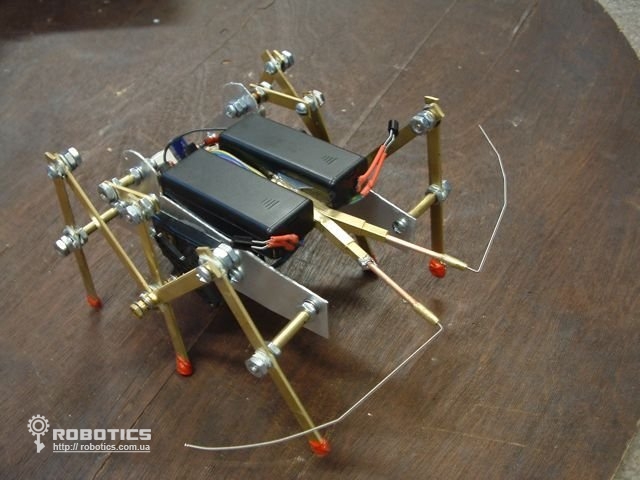
Пропонуємо цікавий механізм - робот Lobsterbot. Особливість даного пристрою полягає у його простоті. Все, що потрібно для керування – це чіп та реле. Корпус містить шість ніг, які можуть бути зроблені самостійно з дерева або готових елементів будь-якого конструктора для роботів. За принципом руху робот нагадує раку – звідси й назва Lobsterbot.
Побудувавши цього робота самостійно, ви зможете переконатися, що шестиногі роботи – річ не тільки цікава і забавна, але й дуже корисна, тому що за допомогою цього робота можна пізнати ази побудови розумних роботів, які стануть у нагоді для подальших досліджень у галузі робототехніки.
За основу ви можете використати готовий каркас робота-шестінога Boe-Bot від Herbie.
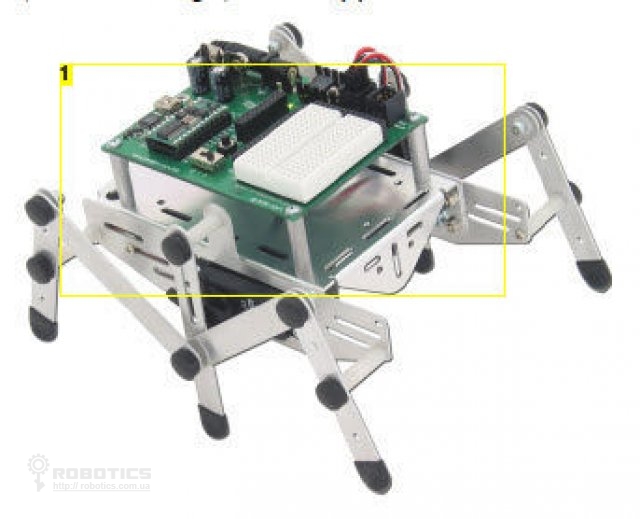
1 – шестиногий набір для робота Boe-Bot.
Крок 1. Каркас робота:
Спочатку попрацюйте над макетом ніг робота. Тіло та ноги можна змайструвати зі шматків картону та прикріпити їх разом мідними цвяхами.
Коли закінчите з макетом, виріжте алюмінієві бічні панелі із 5052 алюмінію товщиною 1/8 дюйма.
Потім можна зробити плоскі відрізки латуні для того, щоб зробити суглоби для ніг робота.
За допомогою шести болтів розміром 1/2 дюйма зробіть довгі опорні точки для ніг. Дивлячись вид зверху, ви можете бачити, що можна використовувати болти та іншої довжини.
Також додайте латунні смужки над болтами для утримання тіла та суглобів ніг. Коли ноги будуть вирівняні, використовуйте утримувач для того, щоб болти та гайки не випали під час ходьби.
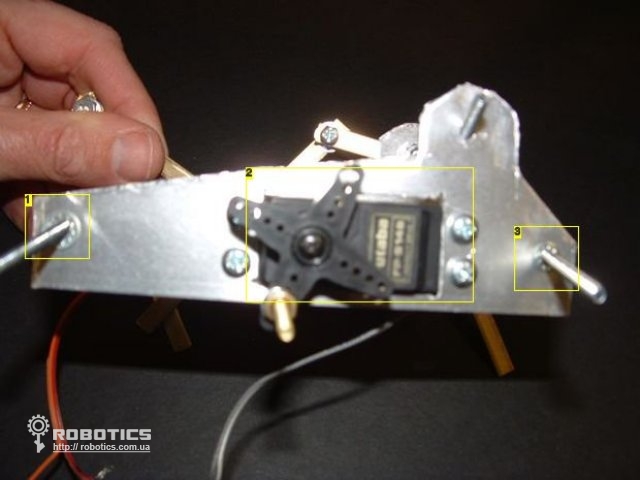
1 – затискна шайба разом із фіксатором; 2 – стандартний сервопривід Futaba, модифікований для безперервного обертання; 3 – болт.

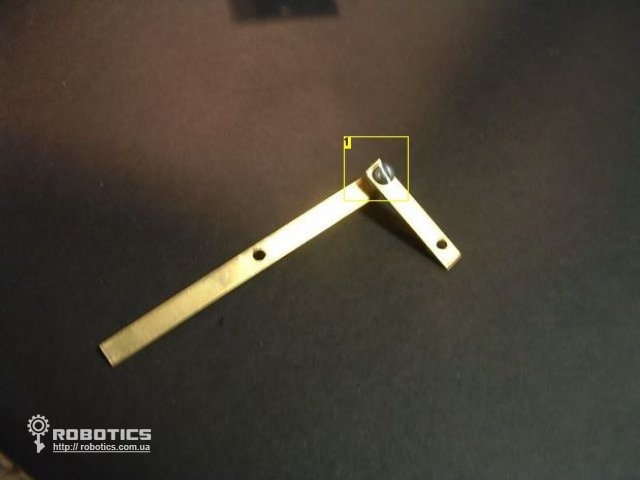
1 - плоский шматок латуні для ніг робота з шістьма болтами, гайками та шайбами різної довжини.

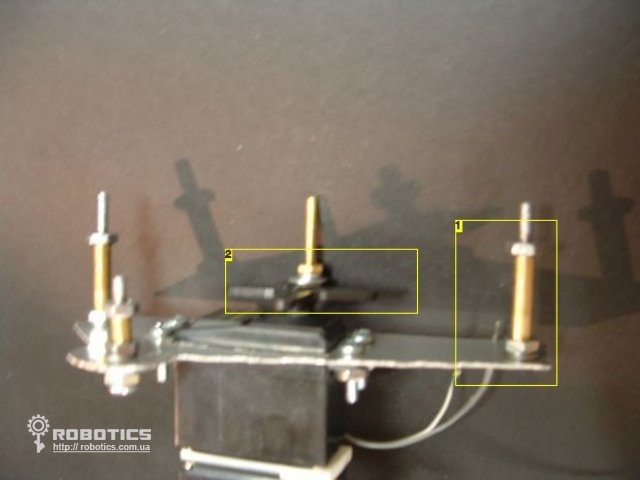
1 – латунна трубка для утримування ніг та тіла робота; 2 - сервопривід, прикріплений болтами.
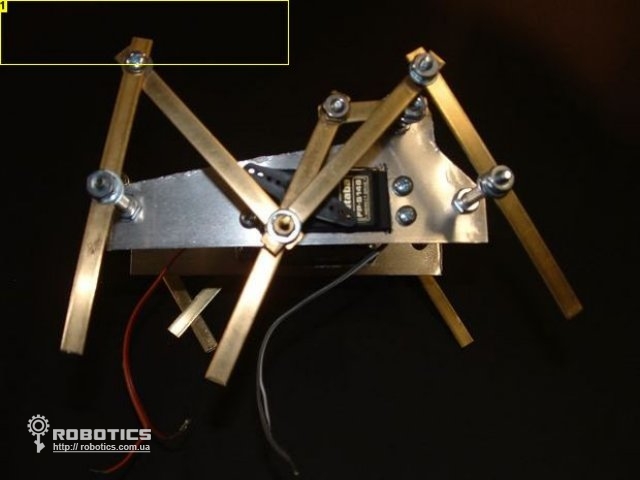
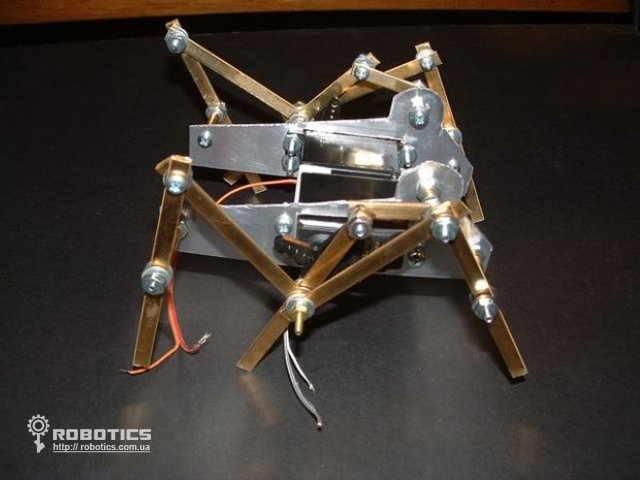
1 – вид збоку.

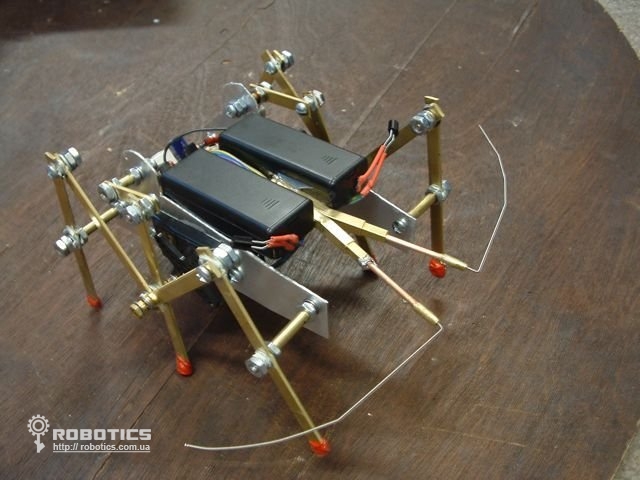
1 – вид зверху: ноги розташовані у шаховому порядку, щоб уникнути зіткнення один з одним.
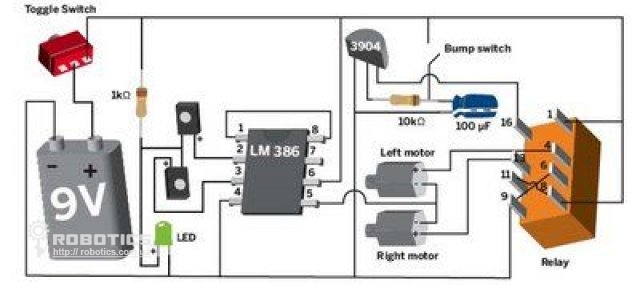
Крок 2. Список матеріалів та схема:
Список деталей:
- 1x 2222A транзистор (подібний до типу 3904)
- 1x LM 386 підсилювач низької потужності (чіп Вт/8 проводів)
- 1x DPDT реле (10 дротів)
- 2x двигуна
- 1x 1k резистор (коричневий із чорно-червоними смужками)
- 1x резистор 10 кОм (коричневий з чорно-жовтогарячими смужками)
- 1x 100uF конденсатор
- 1x червоний світлодіод
- 1x перемикач
- 2 х пластикові коробки акумулятора, кожна з яких містить 2 батареї типу АА
- 1 х двостороння липка піна
- 2 x фотодіоди - Jameco та ін.
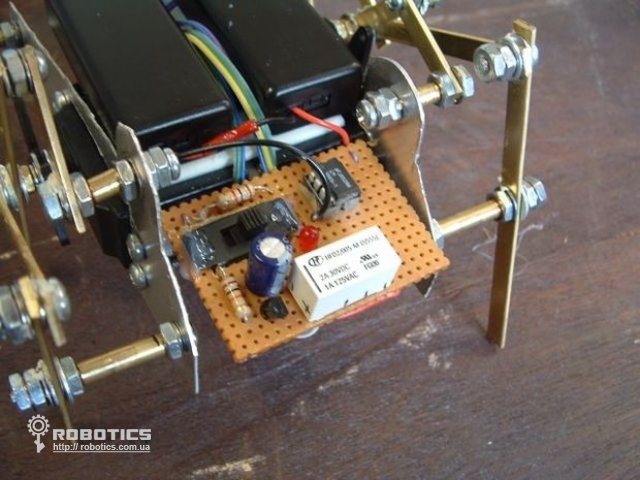
Припаяйте вашу схему до макетної дошки так, щоб було місце для встановлення шасі та сервоприводів.
Сервоприводи повинні бути прикріплені до шасі з 3/8" болтами і гайками. Потім прикріпіть два сервоприводи невеликим відрізком двосторонньої стрічки-піни, яка напрочуд дуже міцно клеїть предмети.
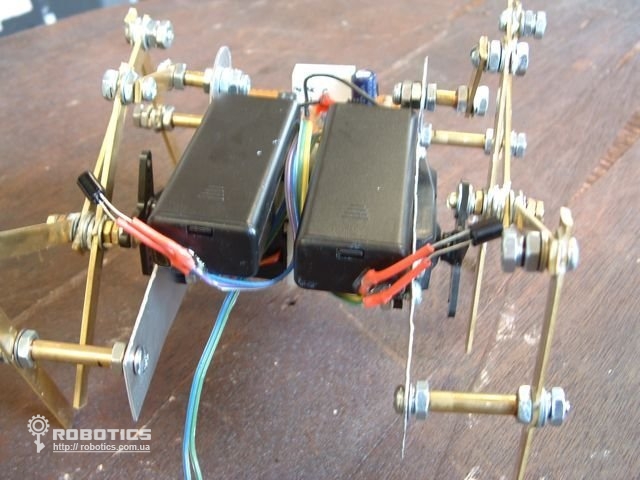
Зніміть "мозок" з кожного сервоприводу і просто припаяйте два дроти безпосередньо до двигуна. Таким чином, вам не потрібні сигнали із широтно-імпульсного модулятора для запуску сервоприводів, вони просто функціонують.
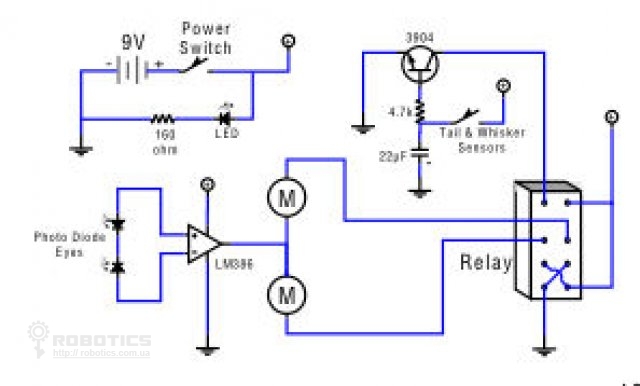

1 – LM386; 2 – двопозиційне реле.
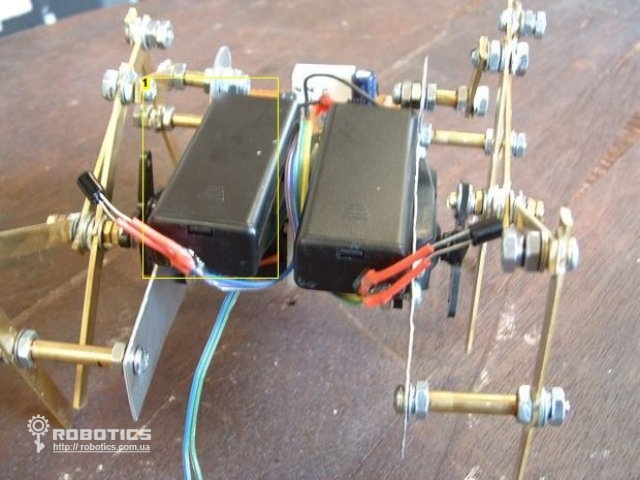
1 – тримач для 2-х батарейок типу АА, приклеєний до сервоприводу.

1 – болти, які тримають сервоприводи дома.
Крок 3. Lobsterbot оживає!
Ви можете використовувати важіль перемикання пристрою, щоб визначити, чи серводвигуни пов'язані з іншими механізмами. Схема потім переводить двигун у зворотному напрямку та здійснює резервне копіювання.
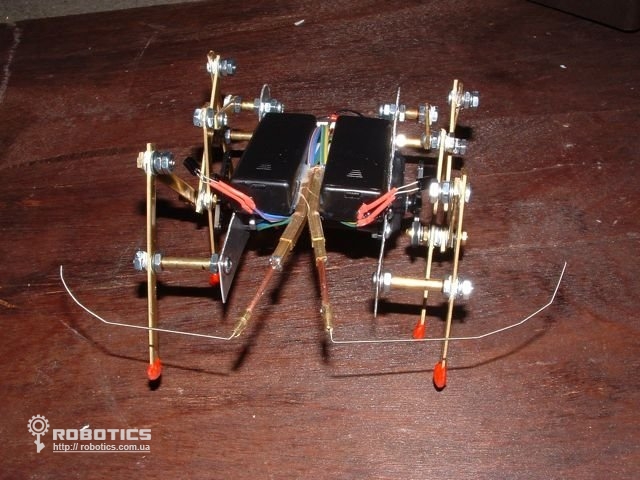
Lobsterbot використовує вусики з датчиками. В основному вони служать просто вимикачем. Коли вуса (з гітарної струни) вступають у контакт, вони нахиляються та торкаються латунної трубки. Один провід датчика надає вусикам підтримку, а інший провід датчика спрямований до гітарної струни. В кінці гітарна струна має термозбіжну трубку навколо нього так, що основа не контактує з трубкою.
Якщо перед роботом існує мертва зона, він може застрягти у деяких речах.
Опустіть кінці латунних ніг у Plastigoop – матеріал, куди ви можете занурити ручки для інструментів для кращого зчеплення на поверхні.
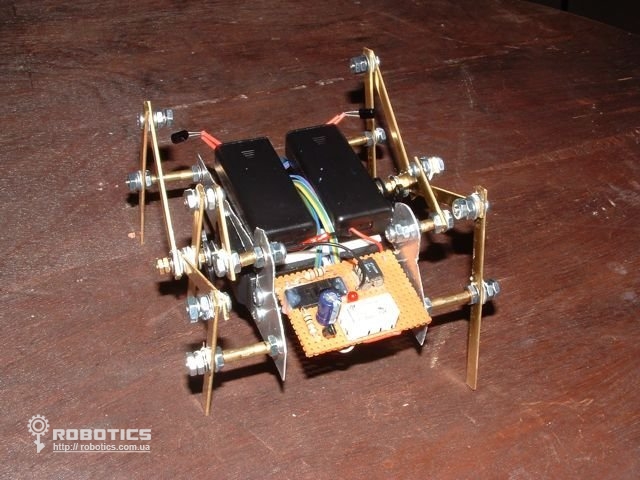
Як бачите, робота Lobsterbot дуже цікаво будувати, і вам дуже сподобаються його рухи, коли живлення подається із двома сервоприводами. Їм весело керувати у темній кімнаті за допомогою ліхтарика.
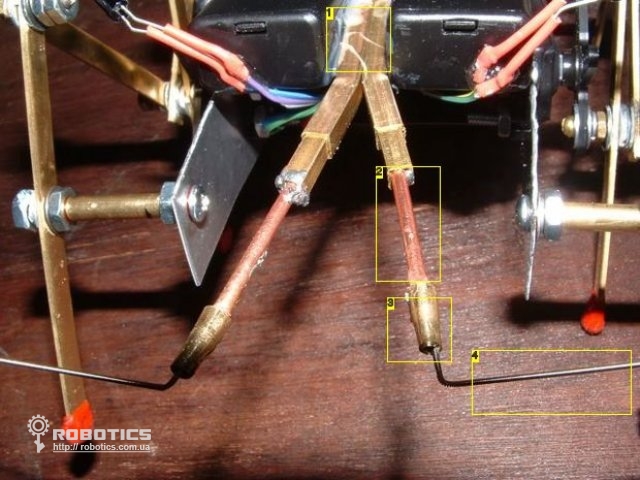
1 – квадратна латунна трубка, 2 – кругла мідна трубка для прикольного вигляду, 3 – кругла латунна трубка, 4 – струна від електрогітари.
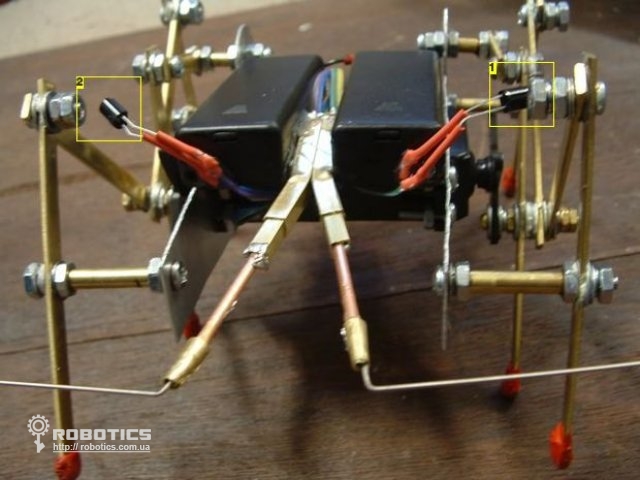
1 – фотодіод; 2 – фотодіод.



")

")
")
")
")
")
")
")
")
")
")

")
")